|
Szkolenie i organizacja pracy Mjr mgr inż. ZBIGNIEW PRZĘZAK Metody naprowadzania rakiet przeciwlotniczych
Pod pojęciem metody naprowadzania rakiet należy rozumieć zbliżanie się rakiety do celu, określone zależnością wymaganych współrzędnych rakiety od współrzędnych i parametrów celu. Zależność ta łączy bieżące współrzędne rakiety z bieżącymi współrzędnymi celu i zapewnia lot rakiety po wymaganym torze. Przy wyborze toru lotu rakiety m.in. uwzględnia się:
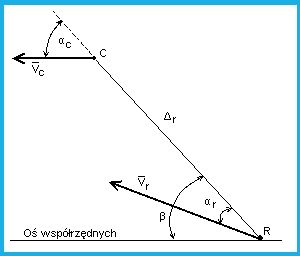
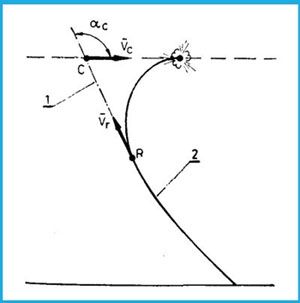
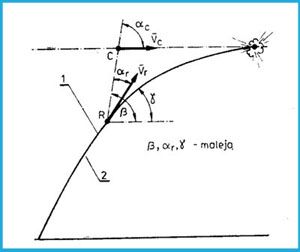
Wybrana metoda naprowadzania jest realizowana za pomocą układu przeliczników wchodzących w skład systemu naprowadzania, które otrzymują informację o względnym położeniu celu i rakiety oraz prędkościach i kierunkach ich ruchu. Na podstawie tych informacji jest obliczony tor lotu i najdogodniejszy punkt spotkania rakiety z celem. Układy przeliczników mogą znajdować się na pokładzie rakiety lub na stanowisku dowodzenia. Typowym zadaniem przelicznika w wielu systemach naprowadzania jest obliczenie prędkości kątowej przemieszczającej się w przestrzeni linii rakieta-cel. Rzutując wektory prędkości Vc i Vr na linię normalną do kierunku rakieta-cel, otrzymamy wyrażenie na kątową prędkość obrotu linii rakieta-cel: dβ/dt=(Vrsinαr/Δr) - (Vc sinαc/Δr) Z powyższego wyrażenia wynika, że na dużych odległościach Δr ruch rakiety i celu wpływa w bardzo małym stopniu na prędkość obrotową linii rakieta-cel. Natomiast na małych odległościach wpływ ten jest znaczny, gdyż nawet niewielkie zmiany ruchu celu i rakiety mogą wywołać gwałtowne zmiany kierunku linii rakieta-cel i doprowadzić do nadmiernego wychylenia sterów, powstania dużych przyspieszeń normalnych, wydłużenia czasu procesu przejściowego i niestatecznego lotu rakiety. Do podstawowych metod naprowadzania rakiet na cel można zaliczyć: naprowadzanie po krzywej pościgu oraz po krzywej pościgu ze stałym wyprzedzeniem; naprowadzanie w punkt spotkania oraz w punkt wyprzedzenia; metodę proporcjonalnego zbliżenia i metodę trzech punktów. Metoda naprowadzania po krzywej pościgu Jest to jedna z najprostszych metod naprowadzania. Rakieta leci bezpośrednio na cel. Wektor prędkości Vr w dowolnym momencie zawsze pokrywa się z kierunkiem linii rakieta-cel. Metoda ta może być wyrażona następującymi równaniami: αr= 0; dβ/dt <> 0 Stąd wniosek, że system naprowadzania prowadzi rakietę na cel bez jakiegokolwiek wyprzedzenia, a położenie linii rakieta-cel w przestrzeni nieprzerwanie się zmienia. Podczas śledzenia oddalającego się celu rakieta może go porazić, jeśli będzie miała wystarczająco duży promień rażenia i wystarczającą prędkość. Podczas śledzenia celu w miarę wzajemnego zbliżania się celu i rakiety gwałtownie wzrasta prędkość kątowa obrotu rakiety i przy stosunku prędkości Vr: Vc=2 przyspieszenie normalne osiągnie wartość nieskończoną. Oznacza to, że w końcowym odcinku śledzenia, kiedy rakieta uzyskuje przyspieszenie maksymalne, cel wolno manewrujący może uniknąć spotkania i uchronić się przed zniszczeniem.
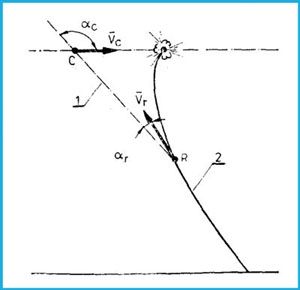
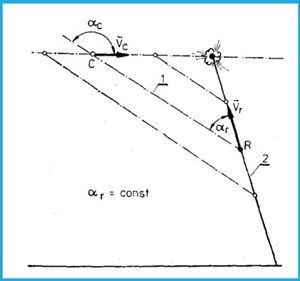
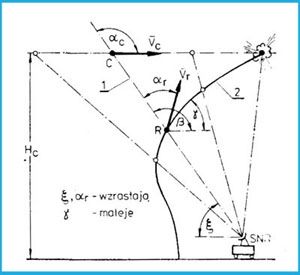
Metoda ta, choć niezwykle prosta, nie jest w praktyce stosowana do naprowadzania rakiet na cele powietrzne. Przypomina ona pościg psa za zającem i dlatego często nazywana jest „psią krzywą" pościgu. Metoda naprowadzania po krzywej pościgu ze stałym wyprzedzeniem Polega ona na tym, że rakieta leci na cel z pewnym stałym wyprzedzeniem (rys. 3) i może być wyrażona następującymi równaniami: αr= const; dβ/dt <> 0 Przy zastosowaniu tej metody rakieta będzie leciała po torze o mniejszej krzywiźnie, a końcowy odcinek drogi będzie prawie prostoliniowy, co nie spowoduje powstania dużych prędkości kątowych. Dogodne warunki porażenia celu uzyskuje się gdy: 1< Vr / Vc =< 2 Zastosowanie tej metody powoduje, że tor lotu rakiety jest bardziej złożony niż po zastosowaniu metody poprzedniej, natomiast czas naprowadzania się zwiększa, a odległość strzelania maleje. Dlatego może ona być stosowana w systemach samonaprowadzania. Metoda naprowadzania do punktu spotkania Przewiduje lot rakiety do punktu spotkania z celem po torze, przy którym linia rakieta—cel zachowuje stały kierunek w przestrzeni.
Jeżeli cel leci kursem prostoliniowym i nie manewruje to metoda może być wyrażona następującymi równaniami αr= const; dβ/dt= 0 jeżeli: dβ/dt= 0 to Vrsinαr= Vc sinαc αr= arc sin(Vcsinαc/Vr) Dla celu nie manewrującego αr= const, a linia rakieta-cel przemieszcza się równolegle do swego początkowego położenia, nie zmieniając kierunku w przestrzeni. Metoda naprowadzania do punktu spotkania często nazywana jest metodą równoległego zbliżania i z przedstawionych dotychczas, dla tych samych warunków strzelań, daje najmniejsze przeciążenia, które nawet przy celach manewrujących nie przekraczają przeciążeń działających na cel. Może być stosowana przy samonaprowadzaniu w systemach dowódczych oraz naprowadzania rakiety do punktu wyprzedzenia w wiązce radiolokacyjnej przy wykorzystaniu dwóch stacji. Metoda proporcjonalnego zbliżenia Przewiduje lot rakiety do punktu spotkania z celem po torze, w którym kątowa prędkość obrotu wektora prędkości rakiety jest proporcjonalna do prędkości obrotu linii rakieta-cel (rys.5).
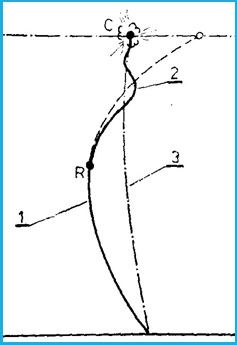
Metoda proporcjonalnego zbliżenia może być wyrażona równaniem: dVr/ dt = k dβ/ dt gdzie: k — stała nawigacyjna. Przyspieszenia normalne przy zastosowaniu tej metody nie osiągają nadmiernych wartości. Może ona być stosowana w systemach samonaprowadzania oraz w systemach dowódczych. Jest metodą najbardziej ogólną, przy której wszystkie poprzednie są przypadkami szczególnymi, stosowanymi w bardziej prostych warunkach. Metoda trzech punktów Zapewnia lot rakiety do punktu spotkania z celem po torze krzywoliniowym, przy którym rakieta nieprzerwanie utrzymuje się w linii prostej łączącej punkt dowodzenia z celem (rys. 6).
Naprowadzanie metodą trzech punktów może być wyrażone następującym równaniem różniczkowym (dla nie manewrującego celu lecącego ze stałą prędkością po linii prostej): (dr / dξ)2 + r2 = (Vr / Vc)2 Hc /sin4ξ gdzie: r — chwilowa odległość rakiety do SNR.
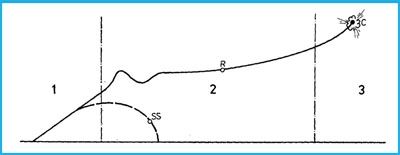
Metoda jest stosowana do naprowadzania rakiet w wiązce radiolokacyjnej oraz w systemach dowódczych. Jej zaletą jest proste stosowanie, wadą - skomplikowany tor lotu podczas naprowadzania rakiety na cel manewrujący. Kombinowane metody naprowadzania W celu zwiększenia dokładności trafienia w odległy cel są stosowane kombinowane metody naprowadzania rakiet. Można wtedy tor rakiety podzielić na trzy fazy naprowadzania: początkowe, na odcinku środkowym, końcowe.
Faza naprowadzania początkowego obejmuje początkowy odcinek toru rakiety, od startu do zakończenia okresu przyspieszenia, to jest do oddzielenia się silnika startowego. Tor lotu rakiety na tym etapie w większości wypadków stanowi linię prostą, kończącą się w strefie działania systemu naprowadzania kierującego rakietą na środkowym odcinku toru. Najbardziej długotrwałą i istotną fazą naprowadzania jest odcinek środkowy, gdyż od dokładności naprowadzania w końcowej jego fazie zależy skuteczność naprowadzania w etapie końcowym. Faza naprowadzania końcowego obejmuje ostatni odcinek toru lotu rakiety i zazwyczaj nie trwa długo. Jest stosowana kiedy dokładność naprowadzania na odcinku środkowym nie jest wystarczająca do zniszczenia celu. Ze względu na możliwości manewrowe celów, jak i stosowanie zakłóceń radioelektronicznych, można w trakcie naprowadzania na odcinku środkowym zmieniać metody naprowadzania, przyjmując najbardziej optymalny tor kinematyczny rakiety w danej sytuacji. Ze względu na stany przejściowe powstające przy przejściu z jednego toru kinematycznego rakiety na drugi, a więc powstawanie dużych chwilowych błędów naprowadzania, należy uwzględniać minimalną odległość pomiędzy celem a rakietą przy której stany przejściowe na torze nie będą wpływały na dokładność naprowadzania końcowego. Naprowadzanie rakiet na cele lecące na małych wysokościach Bardzo istotne jest naprowadzanie rakiet na cele lecące na małych i bardzo małych wysokościach, szczególnie w systemach dowódczych, gdy rakieta po etapie przyspieszenia trafia w strefę działania systemu naprowadzania. Powstające procesy przejściowe w początkowym etapie naprowadzania mogą spowodować zderzenie rakiety z ziemią. Aby wykluczyć tę możliwość, do przelicznika radiolokatora w płaszczyźnie pionowej można wprowadzić program lotu rakiety podnoszący jej tor lotu o z góry zadaną wartość w początkowym etapie naprowadzania. Dalszy etap naprowadzania odbywa się zgodnie z przyjętą metodą. Podniesienie toru lotu rakiety w początkowym etapie naprowadzania może być realizowane w funkcji wysokości lotu celu lub prędkości kątowej celu w płaszczyźnie pionowej. Oddzielnym zagadnieniem, wychodzącym poza ramy tematyczne niniejszego artykułu, jest zabezpieczenie (w zależności od rodzaju zapalnika) głowicy bojowej rakiety przed jej zadziałaniem od powierzchni ziemi, przy zwalczaniu celów nisko lecących.
|