|
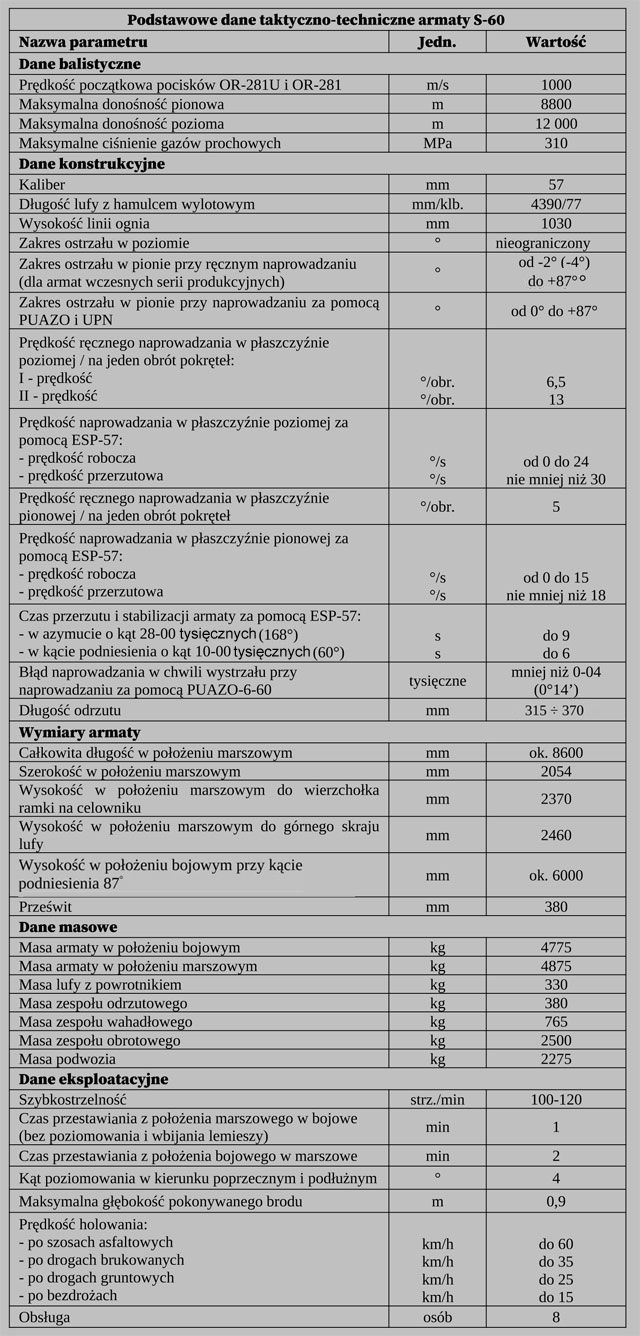
Warszawa, 18 marzec 2022 r. Ostatnia aktualizacja danych: 29.03.2022 r. 57 mm samoczynna armata przeciwlotnicza S-60
POWSTANIE I ROZWÓJ KONSTRUKCJIW 1944 r. w Głównym Zarządzie Artylerii (ros. Gławnoje Artillerijskoje Uprawlenije, GAU) Armii Czerwonej określono kierunki rozwoju uzbrojenia artylerii przeciwlotniczej. Za konieczne uznano opracowanie m.in. nowej armaty małego kalibru, która w jednostkach obrony przeciwlotniczej mogłaby zastąpić przestarzałe już armaty 61-K kalibru 37 mm. Wykonane analizy wykazały, że odpowiednią efektywność ognia zapewni armata o kalibrze 57 mm i szybkostrzelności rzędu 100 strz./min. Projektowanie takiej armaty rozpoczęto pod koniec 1944 r. z udziałem trzech biur konstrukcyjnych. Centralne Artyleryjskie Biuro Konstrukcyjne (ros. Centralnoje Artillerijskoje Konstruktorskoje Biuro, CAKB), z podmoskiewskiego Kaliningradu, przedstawiło projekt automatycznej armaty działającej według nowego układu konstrukcyjnego z tłokowym zamkiem i krótkim skokiem lufy. Konkurentami CAKB było Specjalne Biuro Konstrukcyjne (ros. Spiecyalnoje Konstruktorskoje Biuro, SKB) przy Fabryce nr 88, rozmieszczone na jednym terenie z CAKB, opracowujące projekt 57 mm armaty z układem automatyki wzorowanym na rozwiązaniu przyjętym w armacie 61-K oraz Biuro Konstrukcyjne Fabryki nr 4 w Krasnojarsku, opracowujące projekt armaty 57 mm z tłokowym zamkiem i długim skokiem lufy. Dwa ostatnie projekty zostały negatywnie ocenione przez GAU i do dalszych prac wybrano propozycję CAKB. CAKB powstało w oparciu o postanowienie Państwowego Komitetu Obrony ZSRR (ros. Gosudarstwiennogo Komitieta Oborony, GKO) nr 2477ss z 5.11.1942 r. i podlegało pod Ludowy Komisariat Uzbrojenia (ros. Narodnyj Komissariat Woorużenija, NKW). Dyrektorem i głównym konstruktorem biura został Wasilij G. Grabin, w przyszłości generał-pułkownik wojsk technicznych, profesor, doktor nauk technicznych, jeden z najwybitniejszych radzieckich konstruktorów sprzętu artyleryjskiego. Przedstawiony przez CAKB projekt nowej armaty powstał w zespole kierowanym przez Lwa A. Łoktiewa. Budowę prototypu armaty zakończono w drugiej połowie 1946 r. i do końcu roku został on poddany badaniom na 24. Naukowo-Doświadczalnym Poligonie Artylerii Przeciwlotniczej (ros. 24. Nauczno-Ispytatielnyj Zienitno-Artillerijskij Poligon, 24. NIZAP) w pobliżu m. Czkałow. W toku prowadzonych prób w prototypie wykryto szereg wad, usunięcie których wymagało wprowadzenia istotnych zmian w jego konstrukcji oraz przeprowadzenia uzupełniających prób. Dodatkowe prace trwały niemal trzy lata. W okresie sierpień - wrzesień 1949 r. dopracowany prototyp armaty pomyślnie przeszedł powtórne badania na poligonie. W ich trakcie okazało się, że wymagania postawione przez wojsko nie tylko zostały spełnione, ale udało się osiągnąć znacząco lepsze osiągi w zakresie kluczowych parametrów. Udoskonalony prototyp charakteryzował się: dużą prędkością początkową pocisku (1000 m/s w miejsce wymaganych 950 m/s), dużą szybkostrzelnością (nie mniej niż 100 strz./min w miejsce wymaganych 60-80 strz./min), dużymi przedziałami pracy celownika w zakresie odległości i prędkości celu (4800 m w miejsce wymaganych 4000 m i 240 m/s w miejsce wymaganych 200 m/s - odpowiednio). Na podstawie postanowienia Rady Ministrów ZSRR nr 2197-848ss z 29.05.1949 r. produkcję seryjną armat S-60 uruchomiono w Fabryce nr 4 w Krasnojarsku. W styczniu 1950 r. działo przyjęto do uzbrojenia pod oznaczeniem 57 mm samoczynna armata przeciwlotnicza S-60 wz. 1950 r. (indeks GAU 52-P-281). Za opracowanie armaty S-60 W.G. Grabin i L.A. Łoktiew w 1950 r. otrzymali Nagrodę Stalinowską I stopnia. Pierwsze bojowe użycie armat S-60 miało miejsce podczas wojny koreańskiej, rozpoczętej w czerwcu 1950 r. Niestety, już w początkowym okresie użytkowania armat pojawiły się liczne usterki polegające na: urwaniu pazura wyrzutnika łusek, zniszczeniu magazynu zasilania, uszkodzeniu mechanizmu wyrównoważenia, przekosu lub zaklinowania naboju w magazynie podczas podawania, przejściu naboju poza linię dosyłania, skrajnie krótkim lub skrajnie długim odrzucie lufy. W celu wyjaśnienia powodów tak dużej zawodności nowego uzbrojenia powołano specjalną komisję, która stwierdziła, że armaty S-60 produkowane w latach 1950-1951 posiadały szereg konstrukcyjnych i produkcyjnych wad poważnie wpływających na ich żywotność i gotowość bojową. Zaistniała sytuacja wynikała przede wszystkim z niskiej kultury technicznej w fabrykach uzbrojenia, niewłaściwej kontroli, a także wykorzystywania materiałów o niskiej jakości. Winą za wadliwą produkcję oraz niewłaściwy odbiór sprzętu przez przedstawicieli wojska obarczono osoby z kierownictwa: Ministerstwa Uzbrojenia, Ministerstwa Spraw Wojskowych oraz Fabryki nr 4. Na podstawie postanowienia Rady Ministrów ZSRR Nr 5444-2370 z 31.12.1951 r. “O wadach 57 mm automatycznych armat przeciwlotniczych S-60” zdjęci ze stanowisk, pozbawieni stopni wojskowych i aresztowani zostali m.in.: generał major artylerii I.A. Mirzachanow - zastępcy ministra uzbrojenia; marszałek artylerii N.D. Jakowlew - zastępca ministra spraw wojskowych; generał pułkownik artylerii I.I. Wołkotrubienko - naczelnik GAU. Szczęście dopisało W.G. Grabinowi, który nie był represjonowany. W kwietniu 1953 r., miesiąc po śmierci J.W. Stalina, aresztowanych zwolniono i zrehabilitowano. W 1952 r., do czasu wdrożenia niezbędnych zmian, praktycznie wstrzymano produkcję seryjną armat. W pierwszej kolejności, na przełomie 1952 i 1953 r., wznowiono ją w Fabryce nr 4 (od 30.09.1953 r. po zmianie numeru - Fabryka nr 946), a następnie uruchomiono w kolejnych fabrykach: nr 7 w Leningradzie, nr 92 w m. Gorki i nr 235 w Wotkinsku. Jej produkcja seryjna systematycznie rosła i w poszczególnych latach wyglądała następująco: 1950 r. - 50 szt.; 1951 r. - 251 szt.; 1952 r. - 17 szt.; 1953 r - 397 szt.; 1954 r - 626 szt.; 1955 r. - 1087 szt.; 1956 r. - 1958 szt.; 1957 r. - 1339 szt. Ogółem, w latach 1950 - 1957, w ZSRR wyprodukowano 5725 szt. armat S-60. W 1958 r. w Zakładach Mechanicznych w Tarnowie rozpoczęto licencyjną produkcję armat S-60 pod oznaczeniem fabrycznym - wyrób S-17, którą kontynuowano do 1964 r. Lufy do armat produkowała Huta Stalowa Wola. Armaty S-60 produkowano także na Węgrzech oraz w Chinach. Armata S-60M jest zmodernizowaną wersją armaty S-60. Modernizacja miała na celu zwiększenie bezpieczeństwa transportu armaty po drogach publicznych i polegała na wydłużeniu dyszla zaczepowego z 1000 mm do 1700 mm oraz wyposażeniu podwozia w oświetleniowo-sygnalizacyjną instalację elektryczną. Z tyłu podwozia dodano dwie lampy zespolone (stop, kierunkowskaz i światło pozycyjne) oraz lampę świateł maskowania. Armata S-60MB jest kolejną modernizację wykonaną na początku lat 90. XX w. w Warszawskich Zakładach Radiowych “Rawar”, będących wówczas oddziałem CNPEP “Unitra-Radwar”, na zapotrzebowanie Wojsk Lądowych. Przedmiotem modernizacji były systemy sterowania armaty wykorzystujące układy lampowe. Armatę wyposażono w tranzystorowe układy zasilania napędów oraz komputerowe sterowniki umożliwiające jej naprowadzanie z wozu dowodzenia za pomocą cyfrowych linii transmisji danych. Armata S-60MB jest elementem przeciwlotniczego zestawu artyleryjskiego Blenda składającego się m.in. z: wozu dowodzenia i kierowania ogniem baterii przeciwlotniczej WD-95, czterech dział oraz zespołu prądotwórczego. Badania państwowe zestawu przeprowadzono w 1997 r. Obecnie 24 armaty S-60MB stanowią wyposażenie dwóch dywizjonów przeciwlotniczych Marynarki Wojennej.
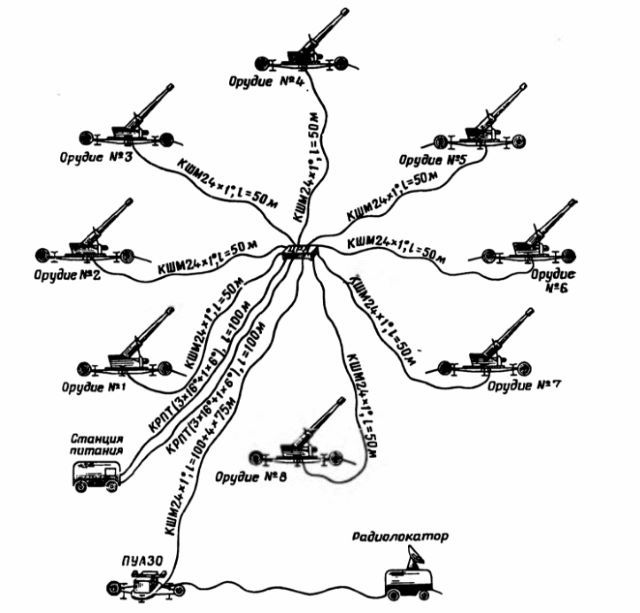
PRZEZNACZENIE I OPIS TECHNICZNY ARMATY57 mm samoczynna armata przeciwlotnicza S-60 jest armatą małego kalibru przeznaczoną do zwalczania celów powietrznych w odległość do 6000 m przy współpracy z przyrządem PUAZO (ros. Pribor Uprawlenija Artillerijskim Zienitnym Ogniom) i w odległość do 5500 m (armaty wczesnych serii produkcyjnych w odległości do 4800 m) przy wykorzystaniu samoczynnego celownika przeciwlotniczego AZP-57 (ros. Awtomaticzeskij Zienitnyj Priceł). S-60 jest pierwszą radziecką małokalibrową armatą przeciwlotniczą artylerii lądowej wyposażoną w napęd nadążny, służący do zdalnego jej naprowadzania w dwóch płaszczyznach. Pierwsze serie armat posiadały napęd ASP-57 lub DON-60, kolejne - napęd nadążny ESP-57 (ros. Elektriczeskij Slediaszczij Priwod). Budowa armaty pozwala wykorzystywać ją także do strzelania do celów naziemnych: siły żywej, punktów ogniowych, czołgów, transporterów opancerzonych, samochodów, itp. obiektów. Strzelanie do celów powietrznych prowadzi się baterią ogniową składającą się z czterech, sześciu lub ośmiu armat S-60. W armii radzieckiej do kierowania ogniem baterii armat S-60 początkowo wykorzystywano przyrząd PUAZO-5/-5A współpracujący z radiolokacyjną stacją artyleryjską SON-9 (ros. Stancyja Orudijnoj Nawodki), która pracowała w zakresie fal o długości 10 cm i umożliwiała prowadzenie ognia do niewidocznych celów powietrznych. Pod koniec lat 50. XX w. do baterii zaczęto wprowadzać nowy przyrząd PUAZO-6-60/-6-60N oraz nową stację SON-9A przystosowaną do pracy w warunkach czynnych zakłóceń szumowych. Od połowy lat 60. XX w. w miejsce pary PUAZO-SON baterie wyposażano w zestaw radiolokacyjno-przelicznikowy RPK-1 Waza. Zestaw posiada radar 1RŁ-35 pracujący w zakresie fal o długości ok. 3 cm oraz analogowy przelicznik balistyczny 1A19. Cała aparatura zestawu, wraz z zespołem prądotwórczym, znajduje się w kabinie zamontowanej na samochodzie ciężarowo-terenowym Ural-375.
Armata S-60 jest bronią samoczynną i wszystkie czynności związane ze strzałem, to znaczy: otwarcie zamka, wyciągnięcie łuski z komory, napięcie zamka, podanie naboju na linię dosyłania, wyrzucenie łuski z wyciągu tłoka zamkowego, dosyłanie naboju z magazynu do komory, zamknięcie zamka i odpalenie dokonywane są automatycznie dzięki energii odrzutu. Konstrukcja armaty pozwala na prowadzenie ognia krótkimi i długimi seriami oraz strzelanie ogniem pojedynczym. Armata jest zasilana z czteronabojowych łódek Sb 67-60 i składa się z następujących głównych zespołów:
Wyposażenie każdej armaty uzupełnia urządzenie służąca do chłodzenia lufy. Lufa wykonana jest w postaci jednolitej rury, na której umieszczono powrotnik sprężynowy. Powrotnik dosyła zespół odrzutowy po strzale w położenie początkowe, utrzymuje zespół odrzutowy w przednim położeniu przy wszystkich kątach podniesienia oraz pochłania część energii odrzutu. Na wylotowej części lufy umocowano perforowany hamulec wylotowy, który pochłania część energii odrzutu podczas strzału. Lufa wraz z powrotnikiem wstawiona jest w gardziel kołyski i połączona z jarzmem lufy. Rura stanowi jedną całość z komorą zamkową. Zamek typu tłokowego, z trzonem o ruchu poosiowym, służy do zamykania przewodu lufy, odpalenia, wyciągnięcia łuski z komory ładunkowej, utrzymania naboju podczas dosyłania do komory ładunkowej. Otwieranie zamka w czasie strzelania następuje, podczas odrzutu, za pomocą przyspieszacza umieszczonego we wsporniku przymocowanym do jarzma lufy. Dosyłanie zamka do przedniego położenia i jego zamykanie następuje za pomocą sprężyn dosyłacza, umieszczonych w zderzaku hydraulicznym i w trzonie zamkowym. Jarzmo lufy wraz z przyspieszaczem i mechanizmem prowadzącym umieszczone jest w kołysce i w czasie strzału przesuwa się płozami po prowadnicach kołyski. Jarzmo lufy jest prowadnicą lufy i stanowi jej tylne oparcie. Do jarzma lufy przymocowany jest wspornik przyspieszacza, w którym umieszczony jest przyspieszacz. Przyspieszacz zwiększa, w czasie odrzutu, prędkość zamka w stosunku do prędkości lufy. Magazyn przeznaczony jest do przyjmowania nabojów i przesyłania ich na linię dosyłania. W armacie zastosowano boczne, ciągłe podawanie nabojów z łódek. Dzięki zastosowaniu mechanizmu zabezpieczającego ciągłość strzelania, w chwili, gdy w magazynie zostanie jeden nabój następuje przerwa w strzelaniu. Do wznowienia strzelania nie trzeba przeładowywać armaty ręcznie, lecz wystarczy doładować do magazynu kolejną łódkę z nabojami. Opornik hydrauliczny typu wrzecionowego, z wyrównywaczem objętości płynu oraz nurnikiem hamującym powrót. Opornik służy do hamowania ruchu zespołu odrzutowego podczas odrzutu i powrotu. Kołyska służy do prowadzenia lufy i jej jarzma w czasie odrzutu i powrotu oraz do prowadzenia zamka podczas napinania i dosyłania. Na kołysce umieszczone są wszystkie mechanizmy automatyki armaty. Do bocznych ścian kołyski przymocowane są czopy z łożyskami rolkowymi. Łożyska umieszczone są w panewkach łoża, co pozwala na obracanie się kołyski podczas nadawania lufie kątów podniesienia. Lufa i kołyska wraz z mechanizmami umieszczonymi na niej stanowi zespół podniesieniowy armaty. Na kołysce umieszczony jest ponadto mechanizm spustowy składający się ze spustu automatycznego i spustu nożnego oraz mechanizm ręcznego napinania zamka. W tylcu kołyski umocowany jest zderzak hydrauliczny, na którym umieszczony jest mechanizm dosyłający. Łoże z pomostem składa się z części górnej, pomostu i części dolnej. Na górnej części łoża i na pomoście umocowane są: zespół podniesieniowy armaty, tarcza ochronna, odciążacz sprężynowy, mechanizmy naprowadzania, samoczynny celownik przeciwlotniczy AZP-57 oraz maszyny elektryczne, przyrządy i przewody napędu ESP-57. Na pomoście umieszczony jest również stół mieszczący cztery łódki nabojowe z 16 nabojami, trzy siedzenia i dwa miejsca stojące dla obsługi. Dolna część łoża składa się z dwóch bieżni zewnętrznych (górnej i dolnej) przymocowanych wraz z wieńcem zębatym nieruchomo do pierścienia oporowego na kadłubie podwozia, bieżni wewnętrznej połączonej z górną częścią łoża, zespołu kulek umieszczonych pomiędzy bieżniami. Dzięki takiej konstrukcji zapewniony jest łatwy obrót łoża. Łoże z pomostem i znajdującymi się na nim mechanizmami oraz z zespołem podniesieniowym stanowi zespół obrotowy armaty. Odciążacz sprężynowy wahliwy, typu ciągnącego, umieszczony jest między ścianami łoża. Składa się on z dwóch jednakowych kolumn. W każdej z nich znajdują się dwie sprężyny. Kolumny odciążacza umocowane są obrotowo we wspornikach łoża. Każda kolumna połączona jest tłoczyskiem z łukiem zębatym kołyski. Odciążacz służy do zrównoważenia zespołu podniesieniowego armaty względem osi czopów przy wszystkich kątach podniesienia lufy. Mechanizmy naprowadzania. Armata posiada dwa niezależnie działające mechanizmy naprowadzania: podniesieniowy i kierunkowy, umieszczone na pomoście z lewej i prawej strony armaty - odpowiednio. Podczas automatycznego lub półautomatycznego naprowadzania mechanizmy te spełniają rolę reduktorów pomiędzy silnikami napędowymi a zespołami wahadłowym i obrotowym armaty. Oprócz tego mechanizmy naprowadzania mogą być napędzane ręcznie. Mechanizm podniesieniowy z jedną prędkość naprowadzania, natomiast mechanizm kierunkowy z dwiema różnymi prędkościami. Ręczne naprowadzanie armaty odbywa się według danych z przyrządu PUAZO lub samoczynnego celownika AZP-57. Mechanizm podniesieniowy składa się z: pokręteł napędu ręcznego, przekładni zębatych, przekładni ślimakowej, wałów oraz układu dźwigniowego do przełączania rodzaju napędu na elektryczny lub ręczny. Koło zębate wału głównego mechanizmu podniesieniowego zazębia się z łukiem zębatym kołyski. W czasie pracy koło to obraca się, w wyniku czego zespołowi podniesieniowemu można nadać odpowiedni kąt podniesienia. Mechanizm kierunkowy zbudowany jest podobnie do mechanizmu podniesieniowego, a dodatkowo posiada on układ dźwigniowy do zmiany prędkości ręcznego naprowadzania. Koło zębate wału głównego mechanizmu kierunkowego zazębia się z wieńcem zębatym dolnej części łoża przymocowanym nieruchomo do podwozia. W czasie naprowadzania armaty koło zębate wału głównego mechanizmu kierunkowego toczy się po wieńcu zębatym i tym samym powoduje obrót łoża z pomostem względem podwozia. Tarcza ochronna służy do osłony obsługi i mechanizmów armaty przed odłamkami i pociskami broni ręcznej i maszynowej. Tarcza składa się z dwóch części lewej i prawej, przymocowanych kątownikami oraz podpórkami do pomostu łoża. U góry każdej z dwóch części tarczy przymocowano odchylane płyty. W położeniu marszowym i podczas strzelania do celów powietrznych z wykorzystaniem celownika półautomatycznego płyty są odchylone do dołu. Przy strzelaniu do celów naziemnych płyty powinny być ustawione pionowo.
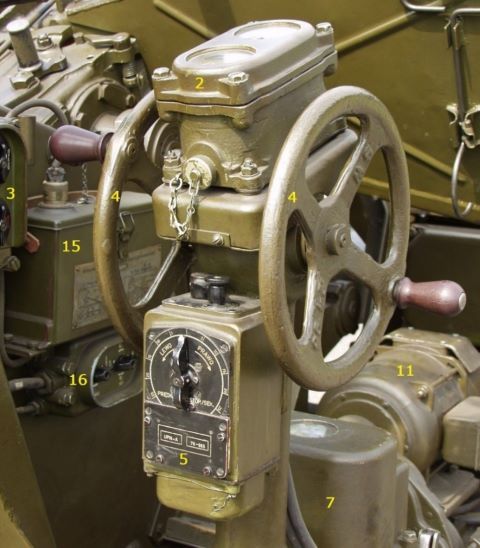
Celownik samoczynny AZP-57 jest mechanicznym celownikiem przeciwlotniczym typu wektorowego. Celownik jest przymocowany do wspornika prawej ściany łoża. Rozwiązanie zadania spotkania pocisku z celem następuje w sposób geometryczny, przy założeniu, że cel porusza się jednostajnie i prostoliniowo. Danymi wejściowymi wprowadzanymi do mechanizmów celownika są: pochyła odległość do celu, prędkość celu, kąt kursowy celu, kąt nurkowania lub wznoszenia oraz kąt położenia celu. Odległość pochyłą do celu określa się za pomocą zewnętrznego dalmierza i nastawia na mechanizmie odległości. Pozostałe dane określa się “na oko” i nastawia na podziałkach odpowiednich mechanizmów. Mechanizm prędkości umożliwia wprowadzenie do celownika, za pomocą pokręteł umieszczonych na głowicy kursowej, prędkości celu. Kąt kursowy celu wprowadza się drogą obrotu głowicy kursowej względem osi pionowej (przy locie celu w poziomie) lub względem osi poziomej (podczas nurkowania lub wznoszenia celu), tak aby makieta samolotu i strzałka naniesiona na głowicy kursowej były skierowane równolegle do widocznego kierunku lotu celu. Mechanizmy kąta nurkowania i wznoszenia służą do wprowadzania wartości kąta nurkowania i wznoszenia. Kąt położenia celu wprowadzany jest samoczynnie w procesie celowania. Służą do tego celu dwa przezierniki (wizjery) kolimatorowe typu WK-3 (ros. Wizir Kollimatornyj) azymutu (prawy) i kąta położenia celu (lewy). Układ optyczny każdego z nich składa się z: siatki, lustra, trójsoczewkowego obiektywu, odbłyśnika oraz filtra światła. Celowniczy (kierunku i podniesienia) widzą obraz świecącej się siatki na tle celu, obraz siatki może być zgrany z obserwowanym celem, co pozwala na wycelowanie armaty. Dane wejściowe wprowadzane do celownika posiadają następujące zakresy wartości: odległość pochyła celu - od 0 do 5500 m (armaty wczesnych serii produkcyjnych od 0 do 4800 m); prędkość celu - od 0 do 300 m/s (armaty wczesnych serii produkcyjnych od 0 do 240 m/s); kąt azymutu celu - nieograniczony; kąt nurkowania celu - od 0° do 90°; kąt wznoszenia celu - od 0° do 70°. Elektryczny napęd nadążny ESP-57. Bateryjny komplet ESP-57 służy do naprowadzania, w azymucie i kącie podniesienia, baterii armat S-60 składającej się z ośmiu lub mniejszej liczby dział zapewniając trzy rodzaje pracy: automatyczne zdalne naprowadzanie wszystkich armat za pomocą przyrządu PUAZO-6-60 (podstawowa metoda naprowadzania); półautomatyczne naprowadzanie każdej armaty za pomocą przyrządów UPN; ręczne naprowadzanie każdej armaty na podstawie danych odbieranych przez wskaźniki zerowe od przyrządu PUAZO-6-60 (wskaźnikowy sposób naprowadzania). W przypadku niesprawności ESP-57 lub braku zasilania elektrycznego każda armata baterii może być naprowadzana ręcznie na podstawie danych wprowadzanych do mechanizmów celownika AZP-57. Bateryjny komplet ESP-57 tworzą: komplety armatnie, centralna skrzynka rozdzielcza (CSR), komplet kabli typu KSzM 24x1 do zasilania elektrycznego i synchronicznego przekazywania danych. Armatni komplet ESP-57 składa się z napędu nadążnego naprowadzania w azymucie (napęd azymutu) i napędu nadążnego naprowadzania w kącie podniesienia (napęd podniesienia). Wspólnymi zespołami dla obu napędów są: zdwojony wzmacniacz lampowy, prostownik selenowy, działowa skrzynka rozdzielcza (DSR), obrotowe urządzenie stykowe (OUS), syrena alarmowa, kable. Każdy z napędów posiada własny: odbiornik, przyrząd półautomatycznego naprowadzania (UPN), wzmacniacz elektromaszynowy (amplidynę), elektryczny silnik wykonawczy, prądnicę tachometryczną SŁ-221, blok wyłączników, blok wskaźników zerowych. Dodatkowo napęd podniesienia jest wyposażony w ogranicznik kąta podniesienia. Wszystkie przyrządy i maszyny elektryczne napędu nadążnego wykonano jako bryzgoodporne, a wyposażenie rozmieszczone na wysokości mniejszej od 0,9 m od powierzchni ziemi (złącze wtykowe, obrotowe urządzenie stykowe i amplidyny) dopuszczone jest do krótkotrwałego zanurzenia w wodzie podczas przekraczania brodu. Każdy z dwóch napędów składa się z czterech zasadniczych układów: pomiarowego, wzmacniającego, wykonawczego oraz stabilizacji. Układy pomiarowe służą do pomiaru kątów niezgodności (rozbieżności) pomiędzy wyliczonym przez PUAZO-6-60 wyprzedzonym azymutem - βw i wyprzedzonym kątem podniesienia - φ a rzeczywistym nastawieniem armaty (w czasie automatycznego i wskaźnikowego naprowadzania) oraz do pomiaru odchylenia prędkości naprowadzania armaty od zadanej wartości (w czasie półautomatycznego naprowadzania) i przekształcania tych wielkości w napięcia sterujące. W pierwszym przypadku układy pomiarowe tworzą selsyny odbiorcze typu SS-405, znajdujące się w armatnich odbiornikach azymutu i kąta podniesienia. W drugim zaś przyrządy UPN-A i UPN-P oraz prądnice tachometryczne SŁ-221, których wirniki połączone są z wałami elektrycznych silników wykonawczych. Układy wzmacniające tworzą: zdwojony wzmacniacz lampowy oraz dwie amplidyny. Wzmacniacz wstępnie wzmacnia napięcia sterujące, a następnie amplidyny wzmacniają je do mocy niezbędnej do pracy układów wykonawczych. Zdwojony wzmacniacz lampowy posiada dwa niezależne bloki pracujące w układach napędu azymutu i kąta podniesienia. Na wejście każdego bloku podawane jest przemienne napięcie sterujące - pochodzące z selsynów odbiornika (w czasie automatycznego i wskaźnikowego naprowadzania) lub stałe napięcie sterujące - będące różnicą napięć z przyrządu UPN i z prądnicy tachometrycznej SŁ-221 (w czasie półautomatycznego naprowadzania). Napięcia wyjściowe z obu bloków zasilają uzwojenia wzbudzenia prądnic odpowiednich amplidyn. Wzmacniacze elektromaszynowe są dwumaszynowymi zespołami elektrycznymi, typu silnik-prądnica, przeznaczonymi do elektromechanicznego wzmocnienia napięcia. Armata posiada dwie amplidyny, jedną typu EMU-12AZAa - w układzie napędu azymutu oraz jedną typu EMU-12AZa - w układzie napędu podniesienia. Każda z amplidyn składa się z napędowego silnika elektrycznego prądu trójfazowego oraz prądnicy prądu stałego, umieszczonych we wspólnej obudowie. Silnik napędowy zasilany jest napięciem 220 V i rozwija moc 1,63 kW przy 2850 obr./min. Prądnica zapewnia moc wyjściową 1 kW oraz napięcie do 110 V. Układy wykonawcze w postaci dwóch elektrycznych silników napędowych (wykonawczych) typu MI-32Ta, każdy o mocy 0,76 kW, zapewniają bezpośrednie naprowadzanie armaty w azymucie i kącie podniesienia. Silnik MI-32Ta jest nawrotną maszyną elektryczną, której uzwojenie wzbudzenia (na stojanie) zasilane jest prądem stałym dostarczanym z odpowiedniej sekcji prostownika selenowego. Uzwojenie wirnika każdego z silników jest zasilane napięciem pochodzącym z prądnicy odpowiedniej amplidyny. Od polaryzacji i wartości tego napięcia zależy kierunek obrotów i prędkość obrotowa silnika. Tak więc obroty armaty są uzależnione od zmiany kierunku i wartości napięcia wyjściowego z amplidyn, które z kolei zależą od parametrów napięć sterujących. Silniki wykonawcze są połączone z ruchomymi zespołami armaty za pośrednictwem przekładni o przełożeniu wynoszącym 612:1 - część obrotowa i 1021:1 - część wahadłowa. Układy stabilizacji są przeznaczone do zapewnienia statecznej pracy napędów nadążnych. W układach wykorzystywane są napięcia wytwarzane przez prądnice tachometryczne SŁ-221 oraz napięcia zdejmowane z uzwojeń kompensujących wzmacniaczy elektromaszynowych. Działanie napędu nadążnego ESP-57. Jak już wspomniano, napęd nadążny zapewnia trzy rodzaje naprowadzania armaty: automatyczny, półautomatyczny i wskaźnikowy. Automatyczne zdalne naprowadzanie odbywa się z wykorzystaniem przelicznika PUAZO-6-60, który samodzielnie lub na podstawie danych otrzymywanych z radiolokacyjnej stacji artyleryjskiej wypracowuje współrzędne kątowe wyprzedzonego punktu położenia celu: βw i φ. Zabudowane w PUAZO-6-60 cztery selsyny nadawcze typu DI-511 (zgrubnego i dokładnego odczytu) przekazują wyliczone współrzędne, za pośrednictwem linii synchronicznego przekazu, CSR, OUS oraz DSR, do czterech selsynów odbiorczych typu SS-405 (zgrubnego i dokładnego odczytu). Uzwojenia stojanów selsynów odbiorczych połączone są elektrycznie z uzwojeniami wirników selsynów nadawczych. Wirniki selsynów odbiorczych połączone są kinematycznie, za pośrednictwem przekładni, z mechanizmami naprowadzania armaty. Napięcia sterujące indukowane są w uzwojeniach wirników selsynów odbiorczych. Ich wartości są proporcjonalne do kątów niezgodności, jakie w danym momencie istnieje pomiędzy wskazaniami PUAZO a armatą. Powstałe napięcia sterująca przekazywane są na wejścia odpowiednich bloków wzmacniacza lampowego. Napięcia sterujące po wzmocnieniu we wzmacniaczu lampowym oraz w amplidynach zasilają uzwojenia wirników silników wykonawczych. Wartość i znak tych napięć określa prędkość i kierunek obrotów silników wykonawczych. Silniki wykonawcze wprawiają w ruch mechanizmy naprowadzania armaty w azymucie i kącie podniesienia i jednocześnie wirniki selsynów odbiorczych, zmniejszając wartość sygnałów niezgodności pomiędzy armatą a PUAZO. Obrót trwa do chwili, aż napięcia sterujące będą równe zeru. Przy kącie niezgodności mniejszym od 0-75-1-30 tysięcznych (4°30’÷7°48’) sterowanie każdym z napędów odbywa się z wykorzystaniem napięcia pochodzącego z selsynu dokładnego odczytu. Przy większej rozbieżności, napęd początkowo wykorzystuje sygnał z selsynu zgrubnego odczytu, a następnie z selsynu dokładnego odczytu. Odbiorniki azymutu i kąta podniesienia służą do wypracowania sygnałów sterujących, zależnych od kątów niezgodności pomiędzy armatą a PUAZO-6-60, odpowiednio - w azymucie i kącie podniesienia, w postaci jednofazowych napięć prądu przemiennego o fazie, która powodują, że napędy nadążne pracują w stronę zmniejszenia kątów niezgodności. Układ konstrukcyjny i schemat elektryczny obu odbiorników jest jednakowy. Różnice dotyczą przede wszystkim budowy wewnętrznych przekładni mechanicznych. W każdym odbiorniku znajdują się po dwa selsyny typu SS-405 (zgrubnego i dokładnego odczytu). Skala na selsynie zgrubnego odczytu obejmuje zakres 60-00 tysięcznych (360°) i jest podzielona na 60 działek. Skala na selsynie dokładnego odczytu obejmuje zakres 1-00 tysięcznych (6°) i jest podzielona na 50 działek. Półautomatyczne naprowadzanie za pomocą przyrządów UPN-A i UPN-P odbywa się według danych z samoczynnego celownika AZP-57. Przyrządy UPN-A i UPN-P zapewniają wypracowanie wymaganych prędkości naprowadzania armaty, odpowiednio w azymucie i kącie podniesienia. Każdy przyrząd posiada m.in.: prądnicę tachometryczną SŁ-121, potencjometr (zasilany z prostownika selenowego), klucz nastawczy oraz sprzęgło. Podczas półautomatycznego naprowadzania pokrętła ręcznego naprowadzania odłączone są od mechanizmów naprowadzania armaty i połączone mechanicznie z odpowiednimi przyrządami UPN. Każde z pokręteł połączone jest, za pośrednictwem przekładni, z wirnikiem prądnicy tachometrycznej SŁ-121 oraz z suwakiem potencjometru. Suwak potencjometru połączony jest z kluczem nastawczym umieszczonym z przodu przyrządu. Półautomatyczne naprowadzania może odbywać się w trzech niezależnych trybach. W trybie pierwszym, naprowadzający w azymucie i kącie podniesienia - śledząc cel w wizjerach WK-3 celownika AZP-57 - obracają pokrętła ręcznego naprowadzania i oddziałują przy tym na przyrządy UPN-A i UPN-P, obracając w każdym z nich suwak potencjometru i jednocześnie klucz nastawczy oraz wirnik prądnicy tachometrycznej SŁ-121. Jeden obrót pokręteł powoduje zmianę prędkości naprowadzania armaty, odpowiednio o 8 °/s w napędzie azymutu i o 6 °/s w napędzie kąta podniesienia. Obrót suwaka potencjometru i klucza nastawczego trwa do opory klucza. Obrót klucza nastawczego od środkowego (zerowego) położenia do opory klucza następuje po ok. 3,8 obrotu pokrętła naprowadzania w azymucie i po ok. 3,1 obrotu pokrętła naprowadzania w kącie podniesienia. Przy dalszych obrotach pokręteł, w każdym z przyrządów UPN działa sprzęgło zabezpieczające potencjometr przed uszkodzeniem i obraca się tylko wirnik prądnicy tachometrycznej SŁ-121. W każdym z przyrządów UPN napięcie z potencjometru jest proporcjonalne do kąta obrotu jego suwaka (klucza nastawczego), a napięcie z prądnicy tachometrycznej SŁ-121 do prędkości obrotowej pokrętła ręcznego naprowadzania. Napięcia te są sumowane ze sobą, a następnie z - podawanym z przeciwnym znakiem - napięciem pochodzącym z odpowiedniej prądnicy tachometrycznej SŁ-221, proporcjonalnym do prędkości obrotowej silnika wykonawczego. Wynikowe napięcie prądu stałego stanowi napięcie sterujące, które jest przesyłane do odpowiedniego bloku wzmacniacza lampowego, a następnie do amplidyny i silnika wykonawczego. Wartość i polaryzacja napięć sterujących określa prędkość i kierunek obrotów silników wykonawczych i jednocześnie armaty. Silniki wykonawcze i armata obracają się do czasu, aż napięcia z przyrządów UPN nie będą równe zeru. Ma to miejsce, gdy ustanie obracanie pokręteł ręcznego naprowadzania, a klucze nastawcze przyrządów zostaną ustawione w środkowe położenie. Przy zmianie polaryzacji napięcia sterującego, spowodowanej zmianą kierunku obrotów pokrętła ręcznego naprowadzania lub klucza nastawczego przyrządu UPN, następuje zmiana kierunku obrotów silnika wykonawczego i samej armaty. W trybie pierwszym, przy obrocie pokręteł ręcznego naprowadzania i niezatrzymanych kluczach przyrządów UPN następuje jednoczesne sterownie według kąta i według prędkości obrotowej, które przy dobrym treningu celowniczych zapewnia najlepszą dokładność naprowadzania armaty na cel. W trybie drugim, naprowadzający śledząc cel w wizjerach WK-3 obracają pokrętła ręcznego naprowadzania i jednocześnie utrzymują ręcznie klucze nastawcze w położeniu zerowym. Wówczas napięcia wyjściowe z przyrządów UPN są zależne tylko od prędkości obrotowych wirników prądnic tachometrycznych SŁ-121, proporcjonalnych do prędkości obrotów pokręteł ręcznego naprowadzania w azymucie i kącie podniesienia. W tym przypadku prędkości naprowadzania armaty będą proporcjonalne do prędkości obrotów pokręteł ręcznego naprowadzania, a jednocześnie z zatrzymaniem pokręteł następuje zatrzymanie armaty. W trybie trzecim, naprowadzający śledząc cel w wizjerach WK-3, przy nieruchomych pokrętłach ręcznego naprowadzania i jednocześnie nieruchomych wirnikach prądnic tachometrycznych SŁ-121, obracają klucze nastawcze w przyrządach UPN-A i UPN-P w wymagane położenie i zmieniając położenie suwaków potencjometrów nadają armacie pożądane prędkości naprowadzania w obu płaszczyznach. Tryb ten jest wykorzystywany podczas przenoszenia ognia na kolejny cel. Przyrządy półautomatycznego naprowadzania UPN-A i UPN-P posiadają jednakową budowę i różnią się jedynie skalami, które pokazują kierunek i prędkość naprowadzania. Kierunek naprowadzania oznaczony jest napisami “LEWO” i “PRAWO” (na przyrządzie UPN-A) oraz “W GÓRĘ” i “DO DOŁU” (na przyrządzie UPN-P). Skala prędkości naprowadzania w azymucie posiada zakres od 0 do 25 °/s, a w kącie podniesienia od 0 do 15 °/s (z działką co 5 °/s na obu skalach). Wskaźnikowe naprowadzanie wykorzystywane jest w przypadku niesprawności napędu ESP-57 (z wyjątkiem odbiorników azymutu i kąta podniesienia oraz bloków wskaźników zerowych) i polega na ręcznym naprowadzaniu armaty według danych z przyrządu PUAZO-6-60. Do każdego z bloków wskaźników zerowych doprowadzane jest napięcie z odpowiednich selsynów odbiorczych typu SS-405 zgrubnego i dokładnego odczytu. Przy położeniu armaty zgodnym ze wskazaniami PUAZO napięcia sterujące są równe zeru i wskazówki wskaźników zerowych zgrubnego i dokładnego odczytu znajdują się w środkowym (zerowym) położeniu. Powstanie niezgodności pomiędzy nastawieniem armaty a wskazaniami PUAZO powoduje, proporcjonalne do jej wartości, odchylenie wskazówek od środkowego położenia. Naprowadzający w kierunku i w kącie podniesienia obracają pokrętła ręcznego naprowadzania armaty, zmieniają jej położenie w obu płaszczyznach i jednocześnie powodują przemieszczanie wskazówek wskaźników zerowych w środkowe położenie. W ten sposób zmniejszają kąt niezgodności i doprowadzają armatę i jednocześnie selsyny odbiorników w położenie zgodne ze wskazaniami PUAZO. Podczas pracy naprowadzający początkowo przemieszczają wskazówki wskaźników zgrubnego odczytu, a następnie wskazówki wskaźników dokładnego odczytu. Bloki wskaźników zerowych WZ-A i WZ-P. Armata wyposażona jest w dwa bloki wskaźników zerowych, po jednym w napędzie azymutu i napędzie podniesienia. Każdy ze bloków posiada m.in.: korpus, dwupołożeniowy przełącznik “Ręczne” - “Automatyczne” oraz dwa wskaźniki do zgrubnego (górny) i dokładnego odczytu (dolny). Wskazówki wskaźników są odchylane w wyniku oddziaływania na nie pól elektromagnetycznych wytwarzanych przez prąd przepływający przez cewki. Pełne odchylenie wskazówek (w prawo lub w lewo) występuje, gdy kąt niezgodności wynosi: dla wskaźników dokładnego odczytu 0-07÷0-13 tysięcznych (0°25’÷0°47’) - podczas automatycznego naprowadzania i 0-40÷0-80 tysięcznych (2°24’÷4°48’) - podczas ręcznego naprowadzania; dla wskaźników zgrubnego odczytu 1-40÷3-00 tysięcznych (8°24’÷18°) - niezależnie od sposobu naprowadzania. W czasie automatycznego naprowadzania bloki wskaźników zerowych umożliwiają kontrolę dokładności naprowadzania armaty. Prostownik selenowy przekształca prąd przemienny o napięciu 220 V w prąd stały niezbędny do zasilania m.in.: przyrządów UPN oraz uzwojeń wzbudzenia silników wykonawczych MI-32Ta i prądnic tachometrycznych SŁ-221. Prostownik składa się z dwóch jednakowych sekcji, niepołączonych elektrycznie. Bloki wyłączników. Armata wyposażona jest w dwa bloki wyłączników, po jednym w każdym z dwóch napędów. Każdy z bloków posiada: górny przełącznik przeznaczony do przełączania napędu z zakresu automatycznego naprowadzania (od przyrządu PUAZO) na zakres półautomatycznego naprowadzania (od przyrządu UPN) i odwrotnie oraz dolny włącznik służący do włączania (wyłączania) napięcia 220 V dostarczanego do: silnika napędowego amplidyny, bloku wzmacniacza i sekcji prostownika selenowego. Ogranicznik kąta podniesienia przeznaczony jest do hamowania i ograniczenia ruchu napędu podniesienia przy zbliżaniu się lufy armaty do ustawionych zakresów. Górny przedział kąta podniesienia wynosi +87° i jest stały. Dolny przedział jest zmienny w zakresie od 0° do +40° - ustawianym na ograniczniku kąta podniesienia za pomocą rękojeści. Obrotowe urządzenie stykowe (OUS) służy do przesyłania energii elektrycznej od złącza wtykowego, zabudowanego na podwoziu armaty, do napędu ESP-57 oraz innych odbiorników znajdujących się na obrotowej części armaty. Dolna nieruchoma część urządzenia jest zamontowana w centralnej części krzyżowego kadłuba podwozia. Górna ruchoma część urządzenia jest obracana za pomocą zabieraka znajdującego się na obrotowej części armaty. OUS zapewnia nieograniczony obrót armaty w azymucie. Górna część urządzenia posiada dwadzieścia obrotowych pierścieni stykowych współpracujących z dwudziestoma parami pierścieni kontaktowych, znajdujących się w części dolnej. Złącze wtykowe służy do podłączenia kabla działowego KSzM 24x1 do armaty. Centralna skrzynka rozdzielcza (CSR) przeznaczona jest do połączenia elektrowni polowej SPO-30, przelicznika PUAZO-6-60, dział baterii oraz wynośnego przycisku do uruchamiania syren. Działowa skrzynka rozdzielcza (DSR) służy do rozdziału napięć elektrycznych, dostarczanych za pośrednictwem CSR i OUS, do poszczególnych urządzeń armaty. DSR zasila: prostownik selenowy, wzmacniacz lampowy, silniki napędowe amplidyn, bloki wyłączników, odbiorniki, bloki wskaźników zerowych, przyrządy UPN, syrenę, instalację oświetleniową oraz prądnice tachometryczne SŁ-221. Syrena alarmowa RWP-220 umieszczona jest na tarczy ochronnej i służy do przekazywania sygnałów dźwiękowych (komend) obsłudze armaty. Na armatach wczesnych serii produkcyjnych syrena alarmowa była zamontowana w DSR. Syrenę uruchamia się za pomocą przycisku podłączonego do CSR. Instalacja oświetleniowa służy do oświetlenia, w czasie nocnych strzelań, skal odbiorników i wskaźników zerowych, skal kursu, prędkości i bębna odległości celownika, a także podświetlenia krzyża przezierników kolimatorowych KW-3 zarówno w nocy, jak i podczas celowania “pod słońce”, a także w czasie pochmurnej pogody. Instalacja oświetleniowa zasilana jest prądem przemiennym z elektrowni polowej albo prądem stałym z baterii akumulatorów znajdującej się na armacie. Bateria mieści sześć akumulatorów niklowo-kadmowych NKN-10, każdy o pojemności po 10 Ah. Podwozie dwuosiowe, czterokołowe służy do transportu armaty oraz stanowi jej podstawę w czasie strzelania. Podwozie składa się z następujących głównych zespołów: krzyżowego kadłuba, dwóch odchylanych podpór, korpusów mostów kołowych (przedniego i tylnego), mechanizmów przestawiania armaty, zawieszenia resorowego, kół, układu hamulcowego kół tylnych z pneumatycznym i ręcznym napędem, czterech podnośników, podstawki lufy, lemieszy do mocowania armaty oraz poziomnic. Krzyżowy kadłub stanowi podstawę podwozia, składa się on z trzech oddzielnych belek: dwóch podłużnych (przedniej i tylnej) oraz jednej poprzecznej. Do końców belki poprzecznej przymocowano są odchylane podpory. Zwiększają one podstawę armaty w kierunku poprzecznym i zapewniają jej stateczność w czasie strzelania przy różnych kątach podniesienia i we wszystkich kierunkach. W położeniu marszowym podpory są odchylone w kierunku tylnego mostu i blokowane. W centralnej części kadłuba zamontowane jest OUS oraz pierścień oporowy do ustawienia dolnej części łoża armaty. Przedni most podwozia połączony jest z kadłubem za pomocą ruchomego połączenia i może obracać się względem niego w obydwu płaszczyznach. Tylny most podwozia połączony jest z kadłubem na stałe. Wewnątrz korpusów mostów kołowych rozmieszczone są hydrauliczne mechanizmy zapewniające szybkie i płynne przestawianie armaty z położenia marszowego w bojowe i odwrotnie. Zawieszenie resorowe każdego koła ma postać przegubowego równoległoboku. Każde koło jest niezależnie resorowane za pomocą wałka skrętnego. Koła podwozia posiadają opony od samochodu ZiS-5, wypełnione masą gąbczastą. Podnośniki służą do wypoziomowania armaty. Urządzenie chłodzące umożliwia chłodzenie lufy w przerwach między seriami strzałów. Podczas ognia ciągłego po 50-60 wystrzałach temperatura zewnętrznej powierzchni u wylotu lufy osiąga temperaturę do 400-450 °C i dalsze strzelanie jest zabronione. Chłodzenie polega na przetłaczaniu specjalnego płynu przez przewód lufy i pozwala na obniżenie jej temperatury z 400-450 °C do 80-100 °C w czasie 3-4 min. Urządzenie chłodzące składa się m.in. z: jednocylindrowej pompy tłokowej dwustronnego działania (model 316) o napędzie ręcznym, zbiornika na ciecz chłodzącą o pojemności 75 dcm3 oraz przewodów rurowych. Źródłem zasilania napędów nadążnych ESP-57 i przelicznika PUAZO-6-60 jest elektrownia polowa SPO-30. Opis oraz zdjęcie elektrowni znajduje się w artykule poświęconym armacie przeciwlotniczej kalibru 100 mm wz. 1947 r. - KS-19. Alternatywnie może być wykorzystywana miejska sieć elektryczna trójfazowego prądu przemiennego, przesyłanego do odbiorników za pośrednictwem elektrowni SPO-30. Do zasilania baterii sześciodziałowej można stosować zespół prądotwórczy AP-24 o mocy 24 kW.
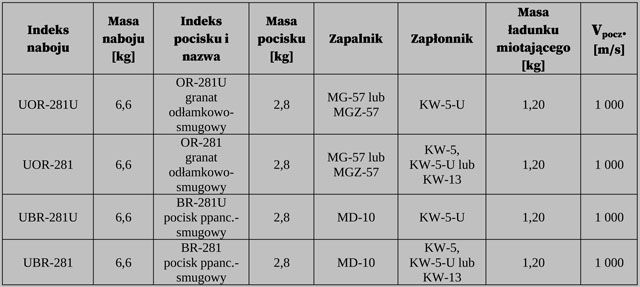
Amunicja. Przy strzelaniu do celów powietrznych i siły żywej stosuje się naboje zespolone UOR-281U lub UOR-281 z granatem odłamkowo-smugowym OR-281U lub OR-281 - odpowiednio, z zapalnikiem głowicowym uderzeniowym MG-57 lub MGZ-57. Zapalnik MG-57 powoduje wybuch granatu w chwili przebijania przeszkody, a zapalnik MGZ-57 w niewielkiej odległości za przeszkodą. Zapalniki posiadają samolikwidator. Przy strzelaniu do innych celów naziemnych używa się nabojów zespolonych UBR-281U lub UBR-281 z pociskiem przeciwpancerno-smugowym BR-281U lub BR-281 - odpowiednio, z zapalnikiem dennym MD-10. Zapalnik nie posiada samolikwidatora. Nabojami zespolonymi UBR-281U i UBR-281 strzela się do naziemnych celów opancerzonych (czołgów, samochodów pancernych, transporterów opancerzonych, dział opancerzonych) znajdujących się w odległości do 1000-1500 m. Naboje UOR-281 i UBR-281 różnią się od nabojów UOR-281U i UBR-281U cieńszymi ściankami szyjki łuski oraz głębszymi rowkami połączeniowymi na pocisku. W nabojach używa się zapłonników KW-5-U, KW-5 lub KW-13, smugacza nr 8 i ładunku miotającego z prochu piroksylinowego marki 11/7. Łuski wykonuje się z mosiądzu lub ze stali. Naboje ćwiczebne są przeznaczone do nauki działoczynów.
Jednostka ognia: 190 szt. (95%) z granatem odłamkowo-smugowym i 10 szt. (5%) z pociskiem przeciwpancerno-smugowym.
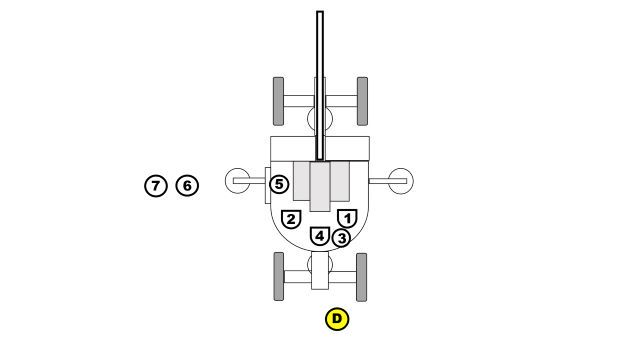
Obsługa armaty składa się z 8 osób. Podczas strzelania z wykorzystaniem samoczynnego celownika AZP-57 na dziale znajduje się pięciu funkcyjnych: 1 - celowniczy kierunku (śledzi cel w przezierniku kolimatorowym, naprowadza ręcznie armatę w azymucie, odpala - utrzymując wciśnięty pedał spustu nożnego); 2 - celowniczy w elewacji (śledzi cel w przezierniku kolimatorowym, naprowadza ręcznie armatę w kącie podniesienia); 3 - pierwszy celownikowy (nastawniczy odległości celu); 4 - drugi celownikowy (nastawniczy prędkości, kursu oraz kąta nurkowania lub wznoszenia celu); 5 - ładowniczy. Podczas strzelania z wykorzystaniem automatycznego zdalnego naprowadzania od przelicznika PUAZO-6-60 na dziale znajduje się dwóch funkcyjnych: ładowniczy oraz celowniczy kierunku, który odpala. W obu przypadkach obok działa przebywają: dowódca (D) oraz dwaj wręczyciele amunicji (6) i (7).
|
|
Bibliografia: |
|