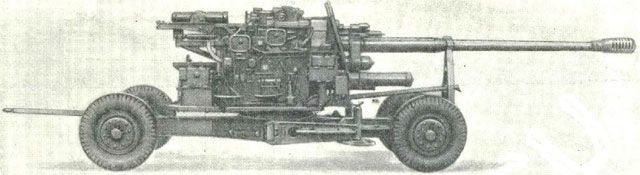
Armata przeciwlotnicza kalibru 100 mm wz. 1947 r. - KS-19 (KS-19M, KS-19M2)
Armata KS-19M2 w położeniu marszowym. Foto: Internet.
Armata KS-19M2 w położeniu bojowym. Foto: Internet.
W 1944 r. w Głównym Zarządzie Artylerii (ros. GAU Gławnoje Artillerijskoje Uprawlenije) Armii Czerwonej określono dalsze kierunki
rozwoju uzbrojenia artylerii przeciwlotniczej. Za konieczne uznano opracowanie, w najbliższych latach, między innymi nowych armat przeciwlotniczych
o kalibrze 57, 100 i 130 mm. Prace nad takimi modelami uzbrojenia rozpoczęto jeszcze w trakcie wojny, ale dopiero po jej zakończeniu działania
te nabrały tempa. Projektowaniem nowej armaty przeciwlotniczej o kalibrze 100 mm zajęło się Biuro Konstrukcyjne Fabryki nr 8 im. M. I. Kalinina
w Swierdłowsku. Prowadzonymi pracami kierował główny konstruktor fabryki Lew W. Luljew. Pierwszy prototyp armaty skierowano do badań ogniowych w
połowie 1947 r. We wrześniu 1947 r. w Fabryce nr 8 wykonano próbną serię składającą się z czterech armat, które w tym samym miesiącu poddano badaniom
zakładowym. W grudniu 1947 r. baterię poddano badaniom wojskowe, podczas których armaty oddały 3 653 wystrzałów i przejechały 1 506 km. W trakcie
prowadzonych prób ujawniono kilka defektów podwozia, które w krótkim czasie wyeliminowano. W oparciu o uzyskane wyniki badań armatę rekomendowano
do przyjęcia do uzbrojenia. Nastąpiło to na mocy Postanowienia Rady Ministrów Nr 2886-1184 z 2 marca 1948 r. Armata otrzymała oznaczenie
“100 mm armata przeciwlotnicza KS-19 wz. 1947 r.”, a Główny Zarząd Artylerii Armii Radzieckiej (powstałej w lutym 1946 r.) nadał
jej indeks 52-P-415. KS-19 pod względem siły rażenia pocisku i celności prowadzonego ognia znacznie przewyższała swoją poprzedniczkę - 85 mm armatę
KS-18A, posiadając podobne charakterystyki manewrowe. Armatę wyposażono - po raz pierwszy w ZSRR - w układ hydraulicznych napędów nadążnych GSP-100
(ros. Gidrawliczeskij Sledjaszczij Priwod), a także w automatyczną nastawnicę zapalnika (ANZ). Układ GSP-100 umożliwiał samoczynne
naprowadzanie armat baterii według wyliczeń przelicznika artyleryjskiego PUAZO (ros. Pribor Uprawlenija Artillerijskim Zienitnym Ogniom),
a ponadto zapewniał przekazywanie do armat danych umożliwiających ręczne wprowadzania do ANZ wymaganej nastawy zapalnika. Za opracowanie armaty
KS-19 jej twórcy, z L. W. Luljewem na czele, otrzymali w 1948 r. prestiżową Nagrodę Stalinowską, która związana była z wysokimi gratyfikacjami
finansowymi.
W 1950 r. w Fabryce nr 8 dokonano modernizacji 100 mm armaty przeciwlotniczej wz. 1947 r. w celu polepszenia jej bojowych i eksploatacyjnych
charakterystyk. W okresie styczeń - czerwiec 1951 r. przeprowadzono próby poligonowe udoskonalonej armaty oznaczonej symbolem KS-19M. Nieco później
opracowano i wprowadzono do produkcji seryjnej kolejną wersję armaty oznaczoną KS-19M2, indeks GAU 52-P-415M, dodatkowo przystosowaną do zwalczania
celów naziemnych i nawodnych. W seryjnych armatach KS-19M2 początkowo stosowano układ GSP-100, który pod koniec 1954 r. zastąpiono nowszą wersją
GSP-100M - dodatkowo wyposażoną w elektryczny napęd nadążny umożliwiający zdalne ustawianie ANZ, zgodnie z przekazanymi z PUAZO danymi dotyczącymi
nastawy zapalnika.
Do kierowania ogniem baterii armat KS-19 opracowano radio-przyrządowy kompleks RPK “Zenit” (ros. RadioPribornyj Kompleks)
składający się z: radiolokacyjnej stacji artyleryjskiej SON-4 (ros. Stancyja Orudijnoj Nawodki) “Łucz” (Promień), przelicznika
PUAZO-7 i elektrowni polowej SPŁ-30. Stacja SON-4, będąca niemal wierną kopią amerykańskiego radaru SCR-584B - produkowanego podczas wojny przez
firmę General Electric Company, powstała w moskiewskim Instytucie Naukowo-Badawczym nr 20 (NII-20) Ministerstwa Uzbrojenia. Opracowany w NII-10
Ministerstwa Przemysłu Stoczniowego przelicznik PUAZO-7 był w pełni automatycznym przyrządem, w którym zadanie spotkania pocisku z celem rozwiązywano
z wykorzystaniem elementów elektromechanicznych. Stację SON-4 wraz z przelicznikiem PUAZO-7 umieszczono w kabinie zamontowanej na dwuosiowej,
ośmiokołowej przyczepie APŁ. Elektrownię SPŁ-30 rozmieszczono na osobnym dwuosiowym podwoziu. Kompleks “Zenit” wraz z baterią 100 mm
armat przeciwlotniczych KS-19 został oficjalnie przyjęty do uzbrojenia w 1950 r.
Największymi mankamentami RPK “Zenit” były ograniczone możliwości obliczeniowe przelicznika PUAZO-7, które nie zapewniały pełnego
wykorzystania balistycznych osiągów armat KS-19 i KS-19M2. Dla PUAZO-7 maksymalne obliczeniowe wartości wysokości i odległości poziomej celu
wynosiły odpowiednio 12,0 km i 12,5 km, podczas gdy granaty odłamkowe O-415 z zapalnikiem WM-45 i O-415R z zapalnikiem AR-21 osiągały pułap
odpowiednio 14,9 km i 15,4 km oraz donośność poziomą ok. 21 km.
Później baterie 100 mm armat wyposażone w stacje SON-4 otrzymały przeliczniki PUAZO-6-19 i PUAZO-6-19A, których zakres pracy w odniesieniu
do pułapu celu wynosił 16 km i umożliwiał pełne wykorzystanie osiągów armat. W kolejnych latach baterie wyposażono w nowsze zestawy do kierowania
ogniem: stacje SON-9, SON-9A lub SON-15 współpracujące z przelicznikami PUAZO-6-19, PUAZO-6-19A lub PUAZO-6-19M, a następnie w RPK Waza-2 (1RŁ39)
wyposażone w przelicznik 1A20.
W 1948 r. w Fabryce nr 8 uruchomiono produkcję seryjną armat KS-19, ale pierwsze 308 egzemplarzy dostarczono dopiero w kolejnym roku. Od 1950 r.
armaty produkowała także Fabryka nr 235 w Wotkinsku. Produkcja w obu fabrykach systematycznie rosła: od 759 szt. w 1950 r., do 2 000 szt. w 1953 r. i
do 2 236 szt. dwa lata później. W latach 1948 - 1955 w obydwu fabrykach wyprodukowano 10 160 armat KS-19, KS-19M i KS-19M2. Według dostępnych
danych produkcję w Wotkinsku kontynuowano do 1957 r. W latach 1956 - 1959 armaty KS-19M2, jako wyrób S-9, były produkowane w Hucie Stalowa Wola
na licencji radzieckiej.
Armata KS-19M2 - Muzeum im. Orła Białego w Skarżysku Kamiennej. Foto: autor.
Armata KS-19M2 - Muzeum Obrony Przeciwlotniczej w Koszalinie. Foto: Autor.
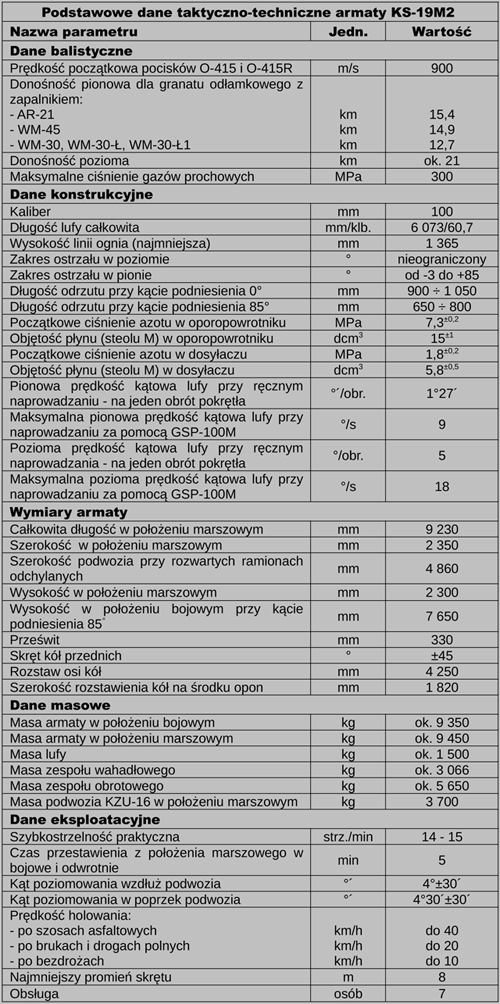
100 mm armata przeciwlotnicza KS-19M2 przeznaczona była do zwalczania celów powietrznych poruszających się z prędkością
do 1 200 km/h na wysokości do 12 000 (14 000) m. Budowa armaty pozwala również na wykorzystanie jej do zwalczania celów naziemnych i nawodnych.
KS-19M2 była armatą całkowicie zmechanizowaną, a cykl wystrzału rozpoczynał się po umieszczeniu przez ładowniczego naboju w korytku ładowniczym i
naciśnięciu przez niego rękojeści uruchamiającej automatyczną nastawnicę zapalnika. Kolejne czynności tj. nastawianie zapalnika, dosyłanie naboju
do komory nabojowej, zamykanie zamka, odpalanie, otwieranie zamka oraz wyrzucanie łuski po wystrzale odbywały się samoczynnie. Armata zapewniała
prowadzenie ognia z szybkostrzelnością wynoszącą od 14 pocisków w pierwszej minucie, 45 pocisków w pierwszych pięciu minutach, do 110 pocisków w
ciągu godziny.
Armata KS-19M2 składała się z następujących zasadniczych zespołów: lufy z zamkiem, kołyski, urządzenia oporopowrotnego, automatycznej nastawnica
zapalnika, korytka ładowniczego, dosyłacza, odciążacza, mechanizmów podniesieniowego i kierunkowego, łoża, płyty fundamentowej, tarczy ochronnej,
układu hydraulicznych napędów nadążnych GSP-100M, przyrządów celowniczych, dzwonu-syreny KŁRP - 110/1, lampy sygnałowej, przyrządu oświetlającego
“Zorza - 8”, podwozia KZU-16. Wyposażenie każdej armaty uzupełniała instalacja OU-W-100 służąca do chłodzenia lufy.
Lufa nadawała pociskowi odpowiednią prędkość początkową oraz kierunek lotu i była złożona z rury jednolitej, nasady zamkowej i
szczelinowego hamulca wylotowego. W czasie odrzutu i powrotu lufa była prowadzona w przedniej części przez jarzmo, a w tylnej za pomocą
prowadnic nasady zamkowej.
Zamek służył do szczelnego zamknięcia przewodu lufy, odpalenia oraz wyrzucenia łuski po wystrzale i był zamkiem klinowym o
pionowym ruchu klina. Mechanizm półsamoczynnego działania typu krzywkowego zapewniał automatyczne otwieranie zamka, wyrzucanie łuski,
utrzymanie zamka w położeniu otwartym i jego zamykanie. Mechanizm odpalający uruchamiany był za pomocą samoczynnego mechanizmu spustowego
lub ręcznie.
Kołyska służyła do umocowania urządzenia oporopowrotnego, prowadzenia lufy przy odrzucie i powrocie oraz do umieszczenia mechanizmów.
Kołyska była wykonana jako odlew staliwny i spoczywała czopami w gniazdach łoża. Z lewej strony kołyski znajdowały się mechanizmy spustowe
(samoczynny i ręczny) oraz mechanizmy zabezpieczające. Z prawej strony umieszczony został mechanizm ręcznego otwierania zamka. U góry kołyski
na wspornikach znajdowały się: automatyczna nastawnica zapalnika, korytko ładownicze oraz dosyłacz. W przedniej części kołyski umocowano
cylinder oporopowrotnika oraz dwa cylindry hamulca powrotu. Tylna część kołyski była połączona z odciążaczem, a od spodu był przymocowany łuk
zębaty mechanizmu podniesieniowego.
Urządzenie oporopowrotne składało się z hydropneumatycznego oporopowrotnika z pływającym tłokiem oraz dwóch hamulców powrotu typu
sprężynowo-hydraulicznego, które zaczynały działać w końcowej fazie powrotu. Cylinder zewnętrzny oporopowrotnika umocowany był nieruchomo w kołysce.
Tłoczysko oporopowrotnika umocowane było w nasadzie zamkowej i w czasie odrzutu przesuwało się razem z lufą. Hamowanie odrzutu i powrotu odbywało
się wskutek oporów w czasie przepływu płynu przez otwory między grzybkami zaworów a ich gniazdami. Oporopowrotnik był napełniony płynem
“steolem M” i azotem. Płyn i azot były rozdzielone za pomocą pływającego tłoka. Urządzenie oporopowrotne służyło do pochłaniania energii
odrzutu przy wystrzale i przywrócenia części odrzutowych do położenia wyjściowego oraz utrzymania ich w tym położeniu przy wszystkich kątach
podniesienia.
Automatyczna nastawnica zapalnika służyła do dokonywania nastaw zapewniających zadziałanie zapalnika na torze lotu pocisku, po upływie
czasu odpowiadającego podziałce wyliczonej i przekazanej przez przelicznik artyleryjski. ANZ była zamocowana na wsporniku kołyski i połączona z
napędowym silnikiem elektrycznym MAO-52/4m i korytkiem ładowniczym. Włączenie nastawnicy następowało po naciśnięciu przez ładowniczego rękojeści ANZ.
Wówczas głowica nastawnicy przesuwała się i obejmowała zapalnik pocisku znajdującego się w korytku ładowniczym, a następnie nastawiała go przekręcając
o wymagany kąt nastawczy kołpak (czepiec) balistyczny zapalnika, w stosunku do jego kadłuba. Następnie głowica powracała do położenia wyjściowego i
jednocześnie włączała napęd korytka ładowniczego, które obracało się wraz z nabojem na linię dosyłania (ładowania). Do zdalnego nastawiania ANZ -
według danych z przelicznika artyleryjskiego PUAZO - służył elektryczny napęd nadążny, którego opis zamieszczono w dalszej części artykułu.
Korytko ładownicze zamocowane było wahadłowo po lewej stronie kołyski i służyło do podtrzymania naboju oraz nadania mu kierunku
podczas załadowania. W górnym położeniu korytka ładowniczego oś znajdującego się w nim naboju pokrywała się z osią głowicy nastawnicy.
Po ustawieniu nastawy zapalnika korytko ładownicze opuszczało się ustawiając nabój na linii dosyłania (wzdłuż osi przewodu lufy) i za pomocą
cięgła uruchamiało dosyłacz. Po dosłaniu naboju i zamknięciu zamka korytko ładownicze, pod działaniem sprężyny, powracało w położenie wyjściowe
i uruchamiało samoczynny mechanizm spustowy - następował wystrzał.
Dosyłacz hydropneumatyczny z hydraulicznym przespieszaczem umieszczony był na kołysce z prawej strony u góry. Na końcu tłoczyska
dosyłacza umieszczony był zabierak, który opierając się o dno łuski dosyłał nabój do komory nabojowej. Działanie przyspieszacza i dosyłacza
oparte było na zasadzie naczyń połączonych. Stosunkowo niewielkie przesunięcie tłoczyska przyspieszacza powodowało duże przesunięcie się tłoczyska
dosyłacza, przez co wzmagało się jego działanie. Po zwolnieniu zabierak pod działaniem sprężonego azotu przesuwał się do przodu i energicznie
dosyłał nabój do komory ładunkowej. Dosyłacz napełniony był płynem “steol M” i azotem.
Odciążacz sprężynowy, o działaniu rozciągającym, służył do równoważenia zespołu wahadłowego armaty i składał się z dwóch cylindrów
umieszczonych w przedniej części łoża.
Mechanizm podniesieniowy łączył łoże z wahadłową częścią armaty i służył do nadawania lufie kątów podniesienia od -3° do +85°.
Mógł on pracować zarówno od napędu hydraulicznego, jak i ręcznego i wraz z pokrętłem napędu ręcznego był umieszczony z prawej strony łoża.
Mechanizm kierunkowy służył do naprowadzania lufy w płaszczyźnie poziomej, dzięki obracaniu łoża armaty na płycie fundamentowej.
Mechanizm wraz z pokrętłem napędu ręcznego był przymocowany do łoża z prawej strony i podobnie jak mechanizm podniesieniowy mógł pracować
zarówno od napędu hydraulicznego, jak i ręcznego.
Łoże przedstawiało sobą konstrukcję spawaną, było ustawione na płycie fundamentowej i połączone z nią obrotowo. Na łożu zamontowano:
cylindry odciążacza, mechanizmy podniesieniowy i kierunkowy, hydrauliczne napędy mechanizmu podniesieniowego i kierunkowego, przyrządy celownicze,
tarczę ochronną oraz urządzenia elektryczne. Łoże stanowiło podstawę zespołu wahadłowego armaty. Podstawa łoża posiadała w centrum otwór dla
dwurzędowego promieniowego łożyska kulkowego, które zapewniało centrowanie łoża na płycie fundamentowej.
Płyta fundamentowa stanowiła podstawę dla obrotowej części armaty i składała się z nieruchomej płyty (przymocowanej śrubami do
podwozia armaty), zębatego wieńca, trzech bieżni tocznych, dwóch rzędów kul oraz pierścienia. Nieruchoma płyta posiadała otwór do zabudowy
nasadki, na którą było nałożone dwurzędowe promieniowe łożysko kulkowe do centrowania łoża. Z płytą był połączony zębaty wieniec, z wewnętrznym
zazębieniem, współpracujący z kołem zębatym mechanizmu kierunkowego. Łatwy obrót łoża (obrotowej części armaty) względem płyty fundamentowej (podwozia)
zapewniały trzy bieżnie toczne. Bieżnie dolna i górna były połączone z nieruchoma płytą, natomiast bieżnia środkowa była przymocowana do podstawy łoża.
Pomiędzy bieżniami, w dwóch rzędach, umieszczono po 72 stalowe kule o średnicy 32 mm, rozłożone równomiernie po obwodzie. Cały ciężar obrotowej części
armaty spoczywał na środkowej i dolnej bieżni oraz na dolnym rzędzie kul. Środkowa i górna bieżnia oraz górny rząd kul zabezpieczał obrotową część
armaty przed pionowym przemieszczaniem się do góry.
Tarcza ochronna służyła do osłony obsługi i mechanizmów armaty przed odłamkami i pociskami broni ręcznej i maszynowej. Tarcza składała się
z dwóch części prawej i lewej przymocowanych do wsporników łoża.
Układ hydraulicznych napędów nadążnych GSP-100M służył do automatycznego odległościowego naprowadzania, w azymucie i kącie podniesienia,
od czterech do ośmiu armat przeciwlotniczych KS-19M2 oraz do automatycznego odległościowego wprowadzania do ANZ danych do nastawy zapalnika. Układ był
sterowany synchronicznie, na podstawie wyliczeń przelicznika artyleryjskiego PUAZO. Przyjęta nazwa hydrauliczny napęd nadążny nie w pełni
odzwierciedlała budowę układu. Był to bowiem układ w części elektrohydrauliczny, a w części elektryczny. GSP-100M dla każdej armaty składał się
z trzech napędów nadążnych, działających niezależnie od siebie. W dwóch z nich, przeznaczonych do naprowadzania armaty, w charakterze napędu pomp
hydraulicznych wykorzystywano silniki elektryczne. Całkowicie elektryczne były także ich układy sterujący. Trzeci z układów, przeznaczony do
nastawiania ANZ, w całości był układem elektrycznym.
Bateryjny komplet GSP-100M składał się z: działowych kompletów GSP-100M - w liczbie równej ilości armat w baterii, centralnej skrzynki
rozdzielczej (CSR) oraz kompletu kabli.
Działowy komplet GSP-100M obejmował:
odbiorniki azymutu i kąta podniesienia;
lampowy wzmacniacz mocy (azymutu i kąta podniesienia);
napędy hydrauliczne azymutu i kąta podniesienia;
silnoprądowy odbiornik ANZ;
lampowy wzmacniacz mocy silnoprądowego odbiornika ANZ;
obrotowe urządzenie stykowe (OUS);
działową skrzynkę rozdzielczą (DSR);
silnoprądową skrzynkę rozdzielczą;
skrzynkę przycisków;
działowe nadajniki azymutu i kąta podniesienia;
elektryczne silniki napędowe do napędu pomp hydraulicznych;
komplet kabli montażowych do zasilania i synchronicznego przekazywania.
Jak wspomniano powyżej, system GSP-100M tworzyły trzy napędy nadążne pracujące w kanałach: azymutu, kąta podniesienia i nastawy ANZ. Każdy z nich
składał się z następujących układów: pomiarowego, sterującego, wykonawczego, stabilizacji (zapewniał stabilną pracę napędu i składał się z prądnicy
tachometrycznej TG-2 - wytwarzającej napięcie stabilizujące oraz z elektrycznego obwodu stabilizującego) i synchronizacji (służącego do automatycznego
uzgodnienie i włączenia napędu przy dowolnym kącie niezgodności).
Wyliczone przez przelicznik PUAZO nastawy działowe do strzelania: azymut wyprzedzony - ßw,
kąt podniesienia - φ i nastawa zapalnika - n były przesyłane do umieszczonych na armatach odbiorników (azymutu, kąta podniesienia i nastawy ANZ)
za pomocą łączy selsynowych tj. układów elektrycznych umożliwiających przekazywanie przemieszczeń kątowych na odległość. Zasadniczymi ich elementami
były selsyny (elektryczne maszyny indukcyjne) nadawcze i odbiorcze oraz linia synchronicznego przekazywania. Dwa dwutorowe łącza wykorzystywano do
przesyłania zgrubnych i dokładnych wartości azymutu wyprzedzonego - ßw oraz kąta podniesienia - φ, ponadto jednotorowe łącze służyło do
przekazywania danych do nastawy zapalnika. W tym miejscu należy wyjaśnić, że zastosowanie jednotorowego łącza oraz dostępnych wówczas selsynów
zapewniało przekazywanie współrzędnych kątowych z dokładnością do 1 ÷ 1,5°, tj. 0-16 ÷ 0-25 tysięcznych. Dla zapewnienia celnego ognia artylerii
przeciwlotniczej wymagano jednak wielokrotnie większej dokładności wynoszącej 4-7´, tj. 0-01 ÷ 0-02 tysięcznych. W układzie GSP-100M zastosowano
dwutorowe łącza umożliwiające przekazywanie współrzędnych kątowych z dokładnością do 3÷4,5´, tj. 0-00,85 ÷ 0-01,3 tysięcznych.
Budowę i działanie układu GSP-100M przedstawiono w oparciu o napęd nadążny w kanale azymutu. Należy zaznaczyć, że obydwa napędy
do naprowadzania armaty działały według identycznych zasad, a niewielkie różnice w ich budowie zostały opisane w dalszej części artykułu.
Układ pomiarowy w kanale azymutu służył do określenia wielkości kąta niezgodności, będącego różnicą pomiędzy wyliczonym przez
PUAZO azymutem wyprzedzonym - ßw a rzeczywistym, chwilowym nastawieniem armaty. Głównymi elementami układu były selsyny-nadajniki i
selsyny-odbiorniki. W charakterze nadajników, zabudowanych w PUAZO, wykorzystywano dwa selsyny DI-511 przeznaczone do przesyłania
zgrubnych i dokładnych wartości azymutu wyprzedzonego. W charakterze odbiorników, zabudowanych w odbiorniku azymutu, zastosowano dwa
selsyny SS-404 - przeznaczone do odbioru sygnałów przesyłanych z PUAZO oraz jeden selsyn transformatorowy SS-405 (TS-405) - służący do
generowania napięcia elektrycznego o wartości proporcjonalnej do kąta niezgodności. Napięcie to było przesyłane do układu sterującego,
gdzie ulegało przekształceniu i wzmocnieniu, a następnie było wykorzystywane do sterowania pracą układu wykonawczego (napędu hydraulicznego).
Odbiornik azymutu znajdował się na łożu z prawej strony armaty (nad siedziskiem kierunkowego). Oprócz wypracowania i przesyłania do
lampowego wzmacniacza mocy sygnału - napięcia odpowiadającego kątowi niezgodności, dodatkowo był on wykorzystywany w charakterze
wskaźnika - przy ręcznym naprowadzaniu armaty. W tym celu został wyposażony w dwie nieruchome skale: zgrubną (z lewej strony) i dokładną
(z prawej strony). Skale posiadały podziałki, odpowiednio co 1-00 i 0-05 tysięcznych, tj. co 6° i 18’. Wewnątrz każdej skali
znajdowały się dwa ruchome wskaźniki: “elektryczny” na wewnętrznej kołowej tarczy - połączonej z odpowiadającym jej selsynem
SS-404 (do zgrubnego lub dokładnego odczytu) oraz “mechaniczny” na kołowym pierścieniu - połączonym z mechanizmem kierunkowym
armaty. Ponadto powyżej skali znajdował się wskaźnik zerowy - przeznaczony do odwzorowania kąta niezgodności w wąskim zakresie
±(0-17 ÷ 0-25) tysięcznych, tj. ±(1°01’ ÷ 1°30’). Przy większych kątach niezgodności wskazówka
wskaźnika opierała się na jednym z dwóch ograniczników i nie pokazywała wielkości kąta.
Układ sterujący składał się z lampowego wzmacniacza mocy i regulatora napędu hydraulicznego, którego najważniejszymi zespołami
były: silnik sterujący A2-406 oraz wzmacniacz hydrauliczny. Na wejście lampowego wzmacniacza mocy doprowadzane były sygnały elektryczne
z układu pomiarowego i stabilizującego. Sygnały te, po przekształceniu i zsumowaniu, były wzmacniane i wykorzystywane do zasilania
silnika A2-406 sterującego pracą układu wykonawczego. Moment obrotowy silnika A2-406 był wzmacniany, we wzmacniaczu hydraulicznym,
do wielkości dostatecznej do zmiany kąta pochylenia tarczy sterującej, regulującej wydatek pompy nurnikowej. W efekcie możliwa była zmiana
prędkości obrotowej wału wyjściowego napędu hydraulicznego. Lampowy wzmacniacz mocy był zabudowany na wewnętrznej powierzchni lewej
tarczy ochronnej, a w jego obudowie mieściły się dwa wzmacniacze - kanału azymutu i kanału kąta podniesienia - pracujące niezależnie
od siebie. Silnik sterujący A2-406 oraz wzmacniacz hydrauliczny znajdowały się wewnątrz korpusu napędu hydraulicznego.
Układ wykonawczy w postaci napędu hydraulicznego zapewniał nawrót obrotów oraz bezstopniową regulację prędkości obrotowej
wału wyjściowego silnika hydraulicznego w przedziale od 0 do 600 ÷ 750 obr./min. Obrót wału wyjściowego napędu hydraulicznego,
za pośrednictwem mechanizmu kierunkowego, zapewniał naprowadzanie armaty w azymucie. Jednocześnie mechaniczne połączenie mechanizmu
kierunkowego armaty z selsynem SS-405, stanowiące element sprzężenia zwrotnego układu śledzącego, powodowało jego obrót w stronę
zmniejszenia kąta niezgodności. Po jego zaniku armata obracała się dalej z prędkością, równą prędkości obrotu selsyna-nadajnika DI-511
dokładnych wartości azymutu wyprzedzonego i była gotowa do otwarcia ognia. Moment obrotowy niezbędny do pracy napędu hydraulicznego
zapewniał silnik elektryczny MAO-61/4A. Silnik był zasilany trójfazowym prądem przemiennym o napięciu 220 V, obracał się ze stałą
prędkością 1 425 obr./min i rozwijał moc nominalną 1,6 kW oraz maksymalną (krótkotrwałą) do 2,6 kW. W charakterze cieczy roboczej w
instalacji stosowano olej hydrauliczny AGM.
Napęd hydrauliczny mechanizmu kierunkowego znajdował się z lewej strony łoża i obejmował korpus, wewnątrz którego zamontowano
m.in.: zębatą pompę hydrauliczną, nurnikową pompę hydrauliczną, silnik hydrauliczny, skrzynkę zaworów i ogranicznik mocy. Wewnątrz
korpusu znajdowały się także niektóre zespoły układu sterującego, o czym wspomniano powyżej.
Zębata pompa hydrauliczna służyła do wytwarzania ciśnienia ok. 0,55 ÷ 0,75 MPa zapewniającego prawidłową pracę
pompy nurnikowej.
Nurnikowa pompa hydrauliczna o wydajności zmiennej od 0 do 40-45 l/min wytwarzała ciśnienie ok. 8,5 ÷ 9,5 MPa niezbędne
do wprawienia w ruch silnika hydraulicznego. Prędkość obrotowa wału pompy hydraulicznej była stała i zgodna z liczbą obrotów elektrycznego
silnika napędowego.
Silnik hydrauliczny przeznaczony był do napędu mechanizmu kierunkowego armaty, z którym połączony był za pomocą przekładni.
Skrzynka zaworów mieściła zawory zabezpieczające układ hydrauliczny przed wzrostem ciśnienia powyżej 0,55 ÷ 0,75 MPa
oraz powyżej 8,5 ÷ 9,5 MPa - odpowiednio przed i za pompą nurnikową.
Ogranicznik mocy służył do ochrony napędu hydraulicznego i napędowego silnika elektrycznego przed przeciążeniami. Przy
wzroście obciążenia na wale wyjściowym napędu hydraulicznego powyżej wartości dopuszczalnej, ogranicznik mocy oddziaływał na wzmacniacz
hydrauliczny, który przestawiał tarczę sterującą pompy hydraulicznej w stronę zerowego położenia. Powodowało to zmniejszenie wydajności
pompy i tym samym prowadziło do spadku ciśnienia w instalacji hydraulicznej.
Praca napędu podczas wystrzału. Podczas wystrzału, w wyniku odrzutu, następował znaczący wzrost obciążeń mechanicznych
m.in. na wale napędu hydraulicznego. Powodowało to gwałtowny wzrost ciśnienia - w obwodzie tłoczenia instalacji hydraulicznej napędu
- do wielkości, przy której działały zawory bezpieczeństwa i przepuszczały olej na stronę niskiego ciśnienia. Jednocześnie ze wzrostem
ciśnienia włączał się ogranicznik mocy i napęd hydrauliczny zatrzymywał się na 0,3 ÷ 0,5 s. W tym czasie pomiędzy armatą a
selsynem DI-511 na PUAZO powstawał kąt niezgodności. Po powtórnym, samoczynnym włączeniu się napędu armata była wprawiana w ruch ze
stopniowo zwiększającą się prędkością. Dla zapewnienia celnego ognia niezbędne było, aby do kolejnego wystrzału armata zdołała
zniwelować kąt niezgodności powstały podczas zatrzymania i rozbiegu napędu hydraulicznego i obracała się z prędkością, równą prędkości
obrotu selsyna-nadajnika DI-511 na PUAZO. Przy normalnych warunkach pracy, po wystrzale, czas rozbiegu i uzyskania zgodności armaty
z PUAZO wynosił od 2 do 3 s.
Budowa i działanie napędu nadążnego w kanale kąta podniesienia. Jak zaznaczono wcześniej, zasada działania napędów nadążnych
naprowadzających armatę w azymucie i kącie podniesienia była identyczna. Różnice w budowie napędów dotyczyły głównie konstrukcji
odbiorników. W odbiorniku kąta podniesienia (zabudowanym nad siedziskiem podniesieniowego) skala zgrubnego odczytu była naniesiona na
1/4 obwodu, podczas gdy w odbiorniku azymutu skala ta zajmowała cały obwód tarczy. Nieco inna była również budowa mechanicznych napędów
odbiorników. Ponadto w napędzie nadążnym kąta podniesienia zastosowano mechanizm ograniczenia kątów obrotu wału wyjściowego, który
zapewniał automatyczne wyłączenie napędu przy zbliżaniu się ruchomych części armaty do mechanicznych opór ograniczających ruch armaty
w płaszczyźnie pionowej od -3° do +85°. Dolny zakres przedziału ograniczenia mógł być regulowany w zakresie od -3° do
+35°, co 5°.
Działowe nadajniki - dwa selsyny DI-501, zabudowane na łożu z prawej strony armaty, umożliwiały kontrolę pracy napędów
azymutu i kąta podniesienia na każdej armacie oddzielnie i niezależnie od pozostałych armat.
Budowa i działaniu napędu nadążnego w kanale nastawy ANZ. Podobnie, jak napędy służące do naprowadzania armaty posiadał on
układy: pomiarowy, sterujący, wykonawczy, stabilizacji i synchronizacji. Układ sterujący w postaci lampowego wzmacniacz mocy
silnoprądowego odbiornika ANZ był wykonany jako oddzielne urządzenie i zabudowany z lewej strony łoża armaty. Elementy pozostałych
układów, w tym m.in.: selsyn-odbiornik SS-404, selsyn transformatorowy SS-405, silnik wykonawczy DARM-15/2, reduktor i prądnicę
tachometryczną TG-2 - zamontowano w korpusie silnoprądowego odbiornika ANZ. Na zewnątrz korpusu umieszczono m. in.: skalę odwzorowującą
nastawę zapalnika i pokrętło ręcznego uzgadniania wskaźnika “mechanicznego” z “elektrycznym”. Silnoprądowy
odbiornik ANZ zabudowany był powyżej lampowego wzmacniacza mocy silnoprądowego odbiornika ANZ. Wyliczone przez PUAZO dane do nastawy
zapalnika przesyłane były z selsyna-nadajnika DI-511, za pomocą jednotorowego łącza, do selsynów SS-404 i SS-405. W przypadku
pojawienia się kąta niezgodności, pomiędzy sygnałem z PUAZO a aktualną nastawą ANZ, selsyn transformatorowy SS-405 generował napięcie
proporcjonalne do jego wartości. Napięcie to wraz z napięciem stabilizującym, wytwarzanym przez prądnicę tachometryczną TG-2, było
podawane na wejście lampowego wzmacniacza mocy silnoprądowego odbiornika ANZ, gdzie po przekształceniu i zsumowaniu, było wzmacniane
do napięcia i mocy niezbędnej do pracy silnika wykonawczego DARM-15/2. Moment obrotowy silnika wykonawczego powodował obrót: wałka
wyjściowego, który ustawiał ANZ zgodnie z przekazanymi z PUAZO danymi dotyczącymi nastawy zapalnika, selsyna-odbiornika SS-405 układu
pomiarowego - w stronę zmniejszenia kąta niezgodności oraz prądnicy tachometrycznej TG-2. Skala do odwzorowania nastawy zapalnika
podzielona była na 181 działek. Wewnątrz skali znajdowały się dwa ruchome wskaźniki: “elektryczny” na wewnętrznej kołowej
tarczy - połączonej z selsynem SS-404 oraz “mechaniczny” na zewnętrznym kołowym pierścieniu - połączonym z mechanizmem
nastawy ANZ. Wskaźnik “elektryczny” pokazywał wyliczoną przez PUAZO nastawę zapalnika. Wskaźnik “mechaniczny”
aktualne ustawienie mechanizmów ANZ.
Obrotowe urządzenie stykowe (OUS) służyło do przesyłania energii elektrycznej od muf kablowych (siłowej i synchronicznej),
zabudowanych na ramie podwozia armaty, do układu GSP-100M oraz do innych odbiorników zabudowanych na obrotowej części armaty.
Urządzenie posiadało 29 obrotowych pierścieni stykowych (ze stopu srebra i miedzi) współpracujących z nieruchomymi stykami (ze srebra).
18 pierścieni przesyłało napięcie w sieci synchronicznego przekazywania, 6 służyło do zasilania trójfazowego, a pozostałe 5 było
zapasowymi. Górna ruchoma część urządzenia z pierścieniami stykowymi była przymocowana do łoża armaty, zaś dolna nieruchoma ze stykami
- do płyty fundamentowej.
Centralna skrzynka rozdzielcza była przeznaczona do rozdziału napięć przesyłanych z elektrowni polowej na: poszczególne armaty
baterii elektrycznych, PUAZO oraz wynośny przycisk do uruchamiania dzwonów-syren i lamp sygnałowych.
Działowa skrzynka rozdzielcza służyła do rozdziału napięć elektrycznych, dostarczanych za pośrednictwem CSR i OUS, na
urządzenia armaty. DSR zasilała: odbiorniki azymutu i kąta podniesienia, lampowy wzmacniacz mocy i lampowy wzmacniacz mocy silnoprądowego
odbiornika ANZ, napędy hydrauliczne azymutu i kąta podniesienia, dzwon-syrenę i lampę sygnałową, baterię akumulatorów i przyrząd
oświetlający Zorza-8.
Silnoprądowa skrzynka rozdzielcza umożliwiała rozdział energii elektrycznej, dostarczanej ze stacji SPO-30 przez CSR i OUS,
do trzech elektrycznych silników napędowych.
Skrzynka przycisków posiadała trzy pary przycisków “Start” i “Stop” służących do włączania i wyłączania
silników elektrycznych przeznaczonych do wprawiania w ruch napędów hydraulicznych azymutu i kąta podniesienia oraz ANZ.
Ręczne naprowadzanie armaty. Przy niesprawnościach niektórych elementów automatycznego naprowadzania układ GSP-100M
umożliwiał ręczne naprowadzanie armaty według azymutu i kata podniesienia oraz ręczne wprowadzania do ANZ danych do nastawiania
zapalnika. W tym celu wykorzystywano układ synchronicznego przekazywania oraz uzgadnianie “mechanicznych” i
“elektrycznych” wskaźników na odbiornikach.
Układ hydraulicznych napędów nadążnych GSP-100 różnił się od układu GSP-100M przede wszystkim tym, że:
nie posiadał elektrycznego napędu nadążnego, służącego do zdalnego przekazywania na nastawnicę ANZ nastaw zapalnika, wypracowanych
w PUAZO;
posiadał wskaźnikowy odbiornik umożliwiający ręczne nastawienie ANZ przez uzgodnienie wskaźników “mechanicznego”
i “elektrycznego” - połączonego z PUAZO za pomocą sieci synchronicznego przekazywania;
nie posiadał obrotowego urządzenia stykowego;
posiadał ogranicznik umożliwiający wykonanie przez obrotową część armaty do dwóch obrotów w jedną stronę, co zabezpieczało
kable elektryczne przed uszkodzeniem;
nie posiadał dzwonu-syreny do przekazywania komend;
posiadał membranową syrenę zabudowaną w działowej skrzynce rozdzielczej.
Przyrządy celownicze służyły do wycelowania armaty w cel, z uwzględnieniem wyprzedzenia w płaszczyźnie pionowej i poziomej,
przy strzelaniu bez PUAZO i obejmowały: celownik mechaniczny, jednookularową lunetę działową PO-1M1 lub PO-1M oraz optyczny kątomierz
działowy PG. Celownik mechaniczny składał się z: mechanizmu kątów położenia, mechanizmu kątów celowania i wyprzedzeń pionowych,
mechanizmu wyprzedzeń kierunku, łuku kątów podniesienia, wskazówki celownika i wskazówki działowej. Przy strzelaniu na wprost do
widocznych celów naziemnych lub powietrznych, wraz z celownikiem mechanicznym, wykorzystywano lunetę działową PO-1M1 lub PO-1M.
Luneta PO-1M posiadała pole widzenia 14° i powiększenie 5×. Przy strzelaniu do celów naziemnych z zakrytych stanowisk ogniowych
stosowano optyczny kątomierz działowy PG. Kątomierz składał się z: obrotowej głowicy, kadłuba i rury okularu. Przyrządy celownicze
umocowane były na łożu, z prawej strony armaty.
Dzwon - syrena KŁRP - 110/1 był przeznaczony do wytworzenia i przekazania sygnałów dźwiękowych (komend) obsłudze działa.
Dzwon-syrena posiadał dwa elektromagnesy z rdzeniami, z których jeden wprawiał w ruch młoteczek uderzający w dzwon, zaś drugi w iglicę
wprawiającą w drgania membranę syreny. Dźwięk wytwarzany przez membranę był wzmacniany przez tubę. Urządzenie było zamontowane na
wewnętrznej, górnej części lewej tarczy ochronnej.
Lampa sygnałowa wytwarzała i przekazywała obsłudze armaty sygnały świetlne (komendy). Lampa była zamontowana na górnej części
ANZ. Obydwa urządzenia sygnałowe były uruchamiane za pomocą wynośnego przycisku umieszczonego na stanowisku dowodzenia baterii, który
za pośrednictwem CSR był podłączony do DSR poszczególnych armat.
Przyrząd oświetlający “Zorza - 8” (ros. Zarja-8) służył do oświetlenia skali urządzeń celowniczych,
głowicy ANZ oraz skali odbiorników i był wykorzystywany podczas strzelania nocą. Przyrząd składał się z baterii akumulatorów 2NKN-10
o napięciu 2,5 V, sieci elektrycznej, oprawek z żarówkami oraz dwóch skrzynek rozdzielczych umocowanych na łożu i mógł być zasilany
z baterii akumulatorów lub z DSR.
Podwozie armaty. Dwuosiową, czterokołową lawetę KZU-16 opracowano w Briańskich Zakładach Mechanicznych nr 13 im. S. M. Kirowa.
Podwozie służyło do transportu armaty oraz stanowiło jej podstawę w czasie strzelania. Charakteryzowało się wysoką mobilnością i
zwrotnością, a także dobrą zdolnością do jazdy po bezdrożach. Podwozie składało się z następujących zasadniczych zespołów: ramy, dwóch
odchylanych ramion, kadłuba mostu przedniego, mostu przedniego i tylnego z kołami, mechanizmu skrętu kół przednich, mechanizmu
hamulcowego, dwóch sprężynowych kompensatorów, czterech podnośników oraz podpórki do mocowania lufy w położeniu marszowym. Rama
przedstawia sobą czworokątną spawaną belkę, o przekroju skrzynkowym, z dwoma bocznymi wysięgnikami do mocowania odchylanych ramion.
Zwiększały one podstawę armaty w kierunku poprzecznym i zapewniały jej stateczność w czasie strzelania przy różnych kątach podniesienia
i we wszystkich kierunkach. W położeniu marszowym ramiona były odchylone w kierunku tylnego mostu i blokowane automatycznymi zapadkami.
W środkowej części ramy znajdowało się koło oporowe do zamocowania płyty fundamentowej. Po prawej stronie środkowej części ramy
przymocowane były dwie mufy do podłączenia elektrycznych kabli siłowego i synchronicznego zasilania zespołów armaty. Koła podwozia
posiadały pełne opony GK o rozmiarze 10,5-20 wypełnione masą z gąbczastego kauczuku. Każde koło było niezależnie resorowane za
pomocą wałka skrętnego. Przedni most podwozia był połączony z ramą wahadłowo, co zapewniało niezależność osi przedniej od tylnej.
Tylne koła wyposażono w hamulce klockowe uruchamiane pneumatycznie lub ręcznie. Podnośniki były przymocowane na końcu podłużnej belki
ramy, na korpusie mostu przedniego oraz na końcach odchylanych ramion i służyły do poziomowania armaty w położeniu bojowym. Przy
przestawianiu armaty z położenia marszowego w bojowe osie obu mostów obracały się, koła podnosiły się w stosunku do ramy podwozia,
a rama podwozie opuszczała się aż do oparcie talerzy podnośników o grunt. W celu ułatwienia przestawiania armaty z położenia marszowego
w bojowe i odwrotnie podwozie wyposażono w dwa kompensatory typu sprężynowego. Podwozie posiadało elektryczną instalację
sygnalizacyjno-oświetleniową, która zwiększała bezpieczeństwo podczas marszu oraz umożliwiała transport armaty po drogach publicznych,
zgodnie z przepisami ruchu drogowego.
Instalacja chłodzenia lufy. W czasie intensywnego prowadzenia ognia, po oddaniu 40 ÷ 45 strzałów, lufa armaty nagrzewała
się i po osiągnięciu dopuszczalnej temperatury 350°C (na wewnętrznej powierzchni tylnej części lufy) dalsze strzelanie nie było
możliwe. Wznowienie ognia mogło nastąpić dopiero po obniżeniu temperatury lufy. Proces samoczynnego chłodzenia lufy trwał około 20 min i
znacznie ograniczał możliwości ogniowe armaty. W celu skrócenia przerwy w strzelaniu, w ukompletowaniu armaty znajdowała się instalacja
OU-W-100 służąca do okresowego chłodzenia lufy. Czynnikiem chłodzącym w instalacji była woda, którą doprowadzano do wnętrza lufy.
Zapas wody w zbiorniku urządzenia wynosi 50 dcm³, co wystarczało na cztero-pięciokrotne jego użycie. Proces chłodzenia lufy trwał ok.
1 ÷ 1,5 min i powodował odparowanie ok. 6 dcm³ wody. Czas od podania komendy “Ochłodzić lufę” do gotowości armaty do
ponownego otwarcia ognia wynosił 3 ÷ 4 min.
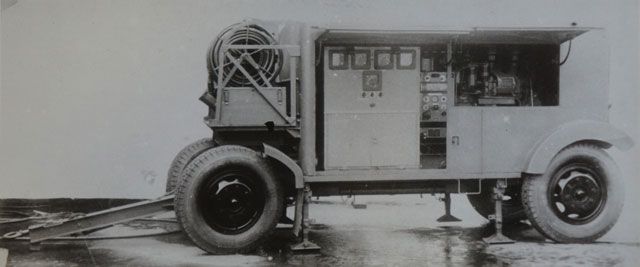
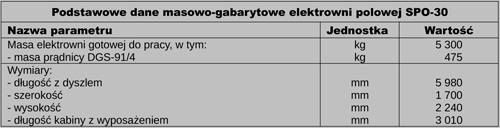
Zasilanie armat baterii w energię elektryczną zapewniała elektrownia polowa SPO-30 (ros. Stancyja Pitanija Orudija
- stacja zasilania armaty) wyposażona w prądnicę DGS-91/4 wytwarzającą trójfazowy prąd przemienny o napięciu 230/133 V, częstotliwości
50 Hz i mocy 30,0 kW (37,5 kVA). Napęd prądnicy zapewniał dwusuwowy, czterocylindrowy silnik spalinowy typu JaAZ-204G o mocy 70 KM.
Do połączenia SPO-30 z CSR wykorzystywano dwa, niezależnie połączone, czterożyłowe kable KRPT 3x16+1x6 o długości po 100 m. Kable
należały do wyposażenia elektrowni polowej. Trójfazowy prąd przemienny o napięciu 220 V był rozdzielany w CSR i doprowadzany kablami
siłowymi KRPT 3x6 do armat, gdzie przez mufy kablowe i OUS zasilał silnoprądowe skrzynki rozdzielcze, a następnie elektryczne silniki
napędowe. Jednofazowy prąd przemienny o napięciu 127 V był rozdzielany w CSR i doprowadzany kablami synchronicznymi KSzM 24x1 do armat
oraz do selsynów-nadajników DI-511 w PUAZO. Z kolei na każdej armacie prąd był przesyłany w obwodzie: mufa kablowa, OUS, DSR, urządzenia
układu GSP-100M oraz pozostałe wyposażenie. Bateria posiadająca osiem armat ukompletowana była w 14 szpuli z kablem KSzM 24x1 (w tym 2
szpule zapasowe) i 10 szpuli z kablem KRPT 3x6 (w tym 2 szpule zapasowe). Długość kabla na każdej szpuli wynosiła 75 m.
Elektrownia polowa SPO-30. Zdjęcie pochodzi z albumu naziemnego sprzętu radiolokacyjnego (CAW WBH)
Amunicja. Przy strzelaniu z armaty KS-19M2 do celów powietrznych stosowano następujące naboje scalone: 53-UO-415 z
granatem odłamkowym O-415 z mechanicznym zapalnikiem czasowym: WM-30, WM-30-Ł, WM-30-Ł1 lub WM-45 lub naboje 53-UO-415R z
granatem odłamkowym O-415R z zapalnikiem zbliżeniowym AR-21 (oznaczenie fabryczne 62 lub 68). Masa zapalnika: WM-30 - 0,715 kg,
WM-30-Ł - 0,595 kg, WM-30-Ł1 - 0,625 kg, WM-45 - 0,625 kg, AR-21 - ok. 1 kg. Czas działania zapalników: WM-30, WM-30-Ł i WM-30-Ł1
wynosił 0,4 ÷ 28,6 s - 181 podziałek, zapalnika WM-45 - 0,66 ÷ 43,7 s - 181 podziałek. Zapalników WM-45 używano
przy strzelaniu do celów lecących na pułapie powyżej 10 000 m. Zapalniki WM-30 i WM-45 nie posiadały na korpusie skali z podziałkami,
a do ich nastawienia wykorzystywano ANZ lub ręczny klucz D-I2 (D-I2U). W razie uszkodzenia ANZ i braku klucza nastawienie zapalnika
nie było możliwe. Zapalnik AR-21 nie wymagał nastawienia. Podczas strzelania granatami O-415R najmniejszy dopuszczalny kąt podniesienia
lufy wynosił 30°, a ANZ musiała być wyłączona.
Strefa ostrzału armaty KS-19M2 dla granatu odłamkowego O-415 z zapalnikiem WM-30 i WM-45. Rysunek pochodzi z podręcznika zasad strzelania
artylerii przeciwlotniczej średniego kalibru (CBW). W przypadku użycia granatu O-415R z zapalnikiem AR-21 strefa ta była nieco większa,
a maksymalny pułap ostrzału wynosił 15,4 km.
Podczas strzelania do celów naziemnych wykorzystywano naboje z granatem odłamkowo-burzącym OF-412 oraz z pociskiem
przeciwpancerno-smugowym BR-412, BR-412B lub BR-412D, pochodzące od 100 mm armaty polowej wz. 1944 (BS-3).
W nabojach stosowano łuski stalowe lub mosiężne, zapłonniki typu KW-13 lub KW-13U, ładunki miotające z prochu typu: NDT-3 18/1,
DG-3 18/1, KS-3 17/1, KSDT-3 17/1 lub KSDF-3 17/1. Jednostka ognia wynosiła 100 naboi, w tym 98 naboi z granatem odłamkowym
przeciwlotniczym i 2 naboje z pociskiem przeciwpancernym smugowym.
Obsługa armaty. Etatową obsługę armaty stanowiło siedem osób: dowódca oraz sześciu funkcyjnych. W szczególnych przypadkach,
przy automatycznym naprowadzaniu armaty z wykorzystaniem układu GSP-100M, obsługa mogła być ograniczona do dwóch-trzech funkcyjnych
(jeden-dwóch wręczycieli oraz ładowniczy-odpalający). Poniżej przedstawiono czynności wykonywane przez funkcyjnych przy różnych
sposobach naprowadzania armaty.
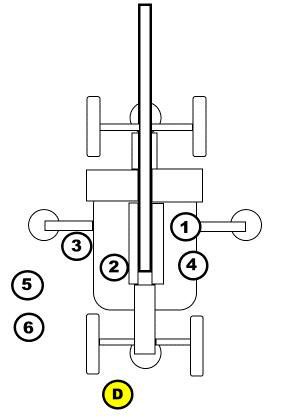
Rozmieszczenie obsługi armaty na stanowisku bojowym.
Prawa strona armaty KS-19M2 - Muzeum im. Orła Białego w Skarżysku Kamiennej. Foto: autor.
100 mm zienitnaja puszka KS-19M2. Albom risunkow k rukowodstwu służby. Moskwa 1960 r.;
100 mm zienitnaja puszka KS-19M2. Rukowodstwo służby. Moskwa 1960 r.;
Album naziemnego sprzętu radiolokacyjnego. MON. Warszawa 1969 r. CAW WBH;
Instrukcja artylerii przeciwlotniczej. Szyki i działoczyny 100 mm baterii artylerii przeciwlotniczej. MON. Warszawa 1959. CAW WBH;
Instrukcja uzbrojenia. 100 mm armata przeciwlotnicza KS-19M2. Opis i eksploatacja armaty. MON 1960 r. CBW;
Instrukcja uzbrojenia. 100 mm armata przeciwlotnicza KS-19M2. Opis i eksploatacja układu zdalnych napędów nadążnych. MON 1961 r. CBW;
Instrukcja uzbrojenia. Elektrownie polowe SPŁ-30 i SPO-30. Opis i eksploatacja. Wydawnictwo MON 1961 r. CBW;
Miechaniczeskije distancyonnyje wzrywatieli WM-30 i WM-45. Moskwa 1957 r.;
Pietuchow S. I., Szestow I. W. - Istorija sozdanija i razwitija woorużenija i wojennoj tiechniki Protiwo-Wozdusznoj Oborony Suchoputnych wojsk Rossii. Moskwa 1998 r.;
Szyrokorad A. B. - Encykłopiedija otieczestwiennoj artillerii. Mińsk 2000 r.;
Tichonow S. G. - Oboronnyje priedprijatija SSSR i Rossii. 2010 r.;
Zasady strzelania artylerii przeciwlotniczej średniego kalibru. Podręcznik. MON 1963 r. CBW.
CAW WBH - Album (instrukcja) pochodzi z zasobów Centralnego Archiwum Wojskowego Wojskowego Biura Historycznego.
CBW - Instrukcja pochodzi ze zbiorów Centralnej Biblioteki Wojskowej.